







I currently have a project that requires monitor the current position of ABB with the PC, the torque and current of each axis motor. My method is to use ABB's PC SDK or Robot Web Services for reading, but I cannot find a method to read it. Does anyone know how to read it?

how can i get the axes motor current?
-
owenlee -
September 23, 2023 at 11:46 AM -
Thread is Unresolved
-
-

Fubini
September 23, 2023 at 12:15 PM Approved the thread. -
Usually multiple ways to see that also a software for checking signals which called by SignalViewer but it depents what model do you using, which controller ?
-
Do you mean the model of the robot? The model of the robot is IRB 1600. I have checked and found that a control module of 616-1 has been installed

Usually multiple ways to see that also a software for checking signals which called by SignalViewer but it depents what model do you using, which controller ?
-
Do you mean the model of the robot? The model of the robot is IRB 1600. I have checked and found that a control module of 616-1 has been installed
Nice we got the version , and what about controller model ? IRB5 or S4C/S4C+ Do you have RobotStudio CD or RobInstall CD ? What is writing on controller ?
-
Nice we got the version , and what about controller model ? IRB5 or S4C/S4C+ Do you have RobotStudio CD or RobInstall CD ? What is writing on controller ?
I checked the controller label and it marked 'type: IRC5 Single '. I have a version of RobotStudio that is 2019.5.5。
And I tried using the PC SDK and was able to access the operating mode robot. GetController (0). OperatingMode normally. But still cannot found the electric current.
-
manual way i think you can check from axes drives inside the control panel . and the other way is
Test Signal Viewer
The Test Signal Viewer enables you to display motion test signals
(e.g. external axes signals).
this software should be inside the robotstudio installation files
for more information like input and output currents please check controller pdf
-
Display More
manual way i think you can check from axes drives inside the control panel . and the other way is
Test Signal Viewer
The Test Signal Viewer enables you to display motion test signals
(e.g. external axes signals).
this software should be inside the robotstudio installation files
for more information like input and output currents please check controller pdf
Thanks a lot, I will read the pdf carefully. But in fact, I have also checked a lot of information, and basically can only check the torque of each axis normally. However, I can find no information about the current, and I hope I can find it in the PDF.
-
Hello all,
I'm sticking to the post question and expanding a little - is it possible to get via ABB RWS (web services) current values of the below parameters?
- joint velocity
- joint acceleration
- joint torque
- joint temperature
- joint current
It seems the only available joint current value is joint position.
Many thanks for any hints

-
hello i am not much familiar with RWS but if you can reach and comminicate with robot for expample RAPID files you can see joint acceleration,velocity,torque and current.About temperature i think your robots model must have joint temperature sensors like , PT100 or else depents on your robot model specs
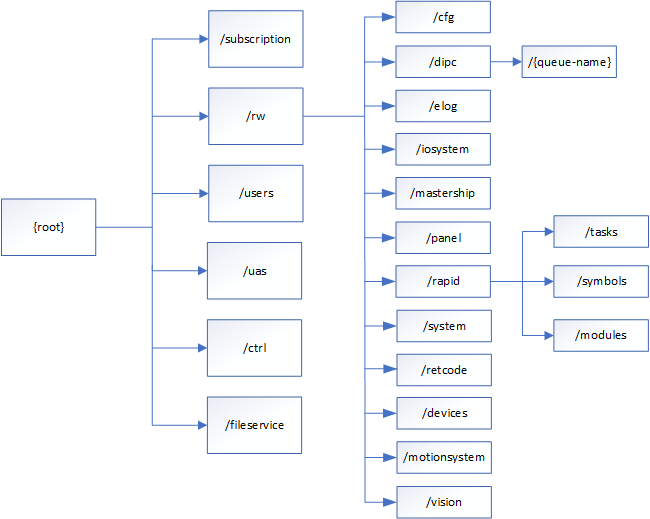
Here is services about RWS ,
-
Thank you for everyone's attention.
I also tried RWS, but I couldn't find the variable for current yet.
What was mentioned upstairs is correct; I just want to read these parameters except temperature:
- joint velocity
- joint acceleration
- joint torque
- joint current
-
hello i am not much familiar with RWS but if you can reach and comminicate with robot for expample RAPID files you can see joint acceleration,velocity,torque and current.About temperature i think your robots model must have joint temperature sensors like , PT100 or else depents on your robot model specs
Here is services about RWS ,
Thank you Mertkan for your thoughts! It's true you can get to the RAPID files via RWS and read parameters of a specific line, e.g. MOVEJ jTarget, speed, but this would be a target speed (which might be even not achieved during the movement if the consecutive points lie close too each other) and the question is if there is a way to read the current value of the joint/tcp speed via web services and regardless what is written in RAPID code?
-

Thank you Mertkan for your thoughts! It's true you can get to the RAPID files via RWS and read parameters of a specific line, e.g. MOVEJ jTarget, speed, but this would be a target speed (which might be even not achieved during the movement if the consecutive points lie close too each other) and the question is if there is a way to read the current value of the joint/tcp speed via web services and regardless what is written in RAPID code?
Hello, to read the tcp speed, you should use a system output attach a analog signal. Then you can subscribe to that signal using RWS
/BlueIcaro
Advertising from our partners






