Hello all,
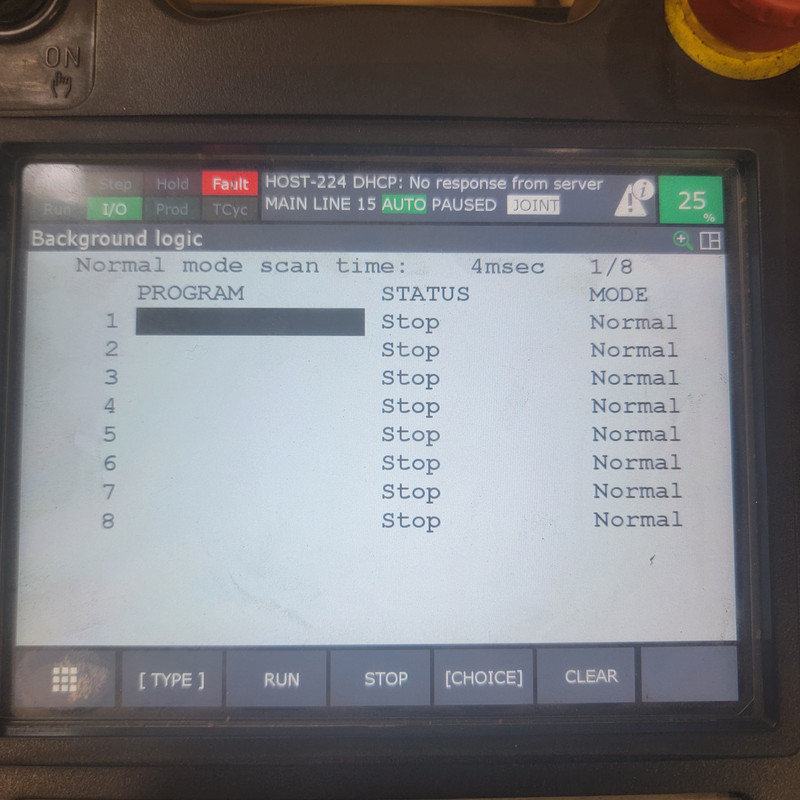
We set up a new Fanuc Robot M-20iD/35 in an attempt to hook it up to one of our CNC machines. The issue is, whenever the robot is switched into automatic mode the override speed on the pendant starts fluctuating wildly. The speed the robot moves at while being run from the CNC control doesn't actually change, but this speed fluctuating so wildly it will intermittently cause a speed over travel limit alarm.
While in either automatic or manual mode, the pendant will not allow me to set the speed over 25%. I believe the machine control is trying to set the speed to 100% and the pendant is limiting it back down to 25%, and it just goes back and forth. Does anyone know why a new Fanuc pendant would be limiting the override speed like this, and how to resolve the issue?