

here is our file. Thanks!
Posts by AndreyOlgovich
-
-
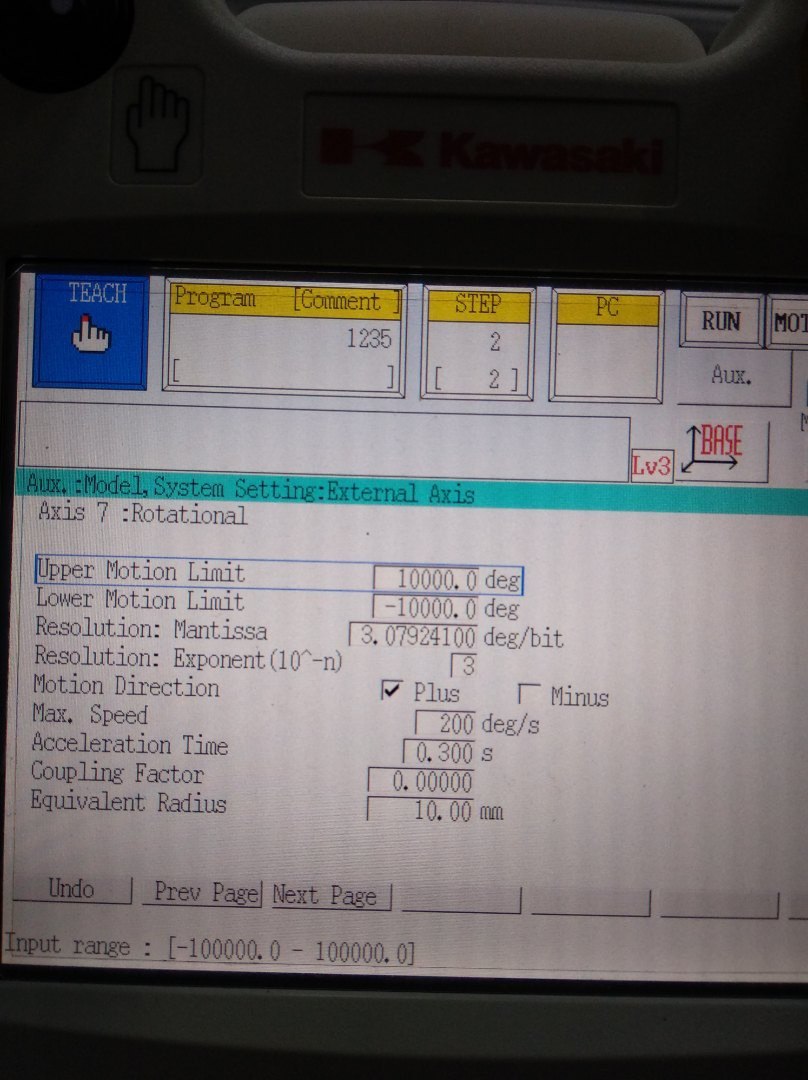
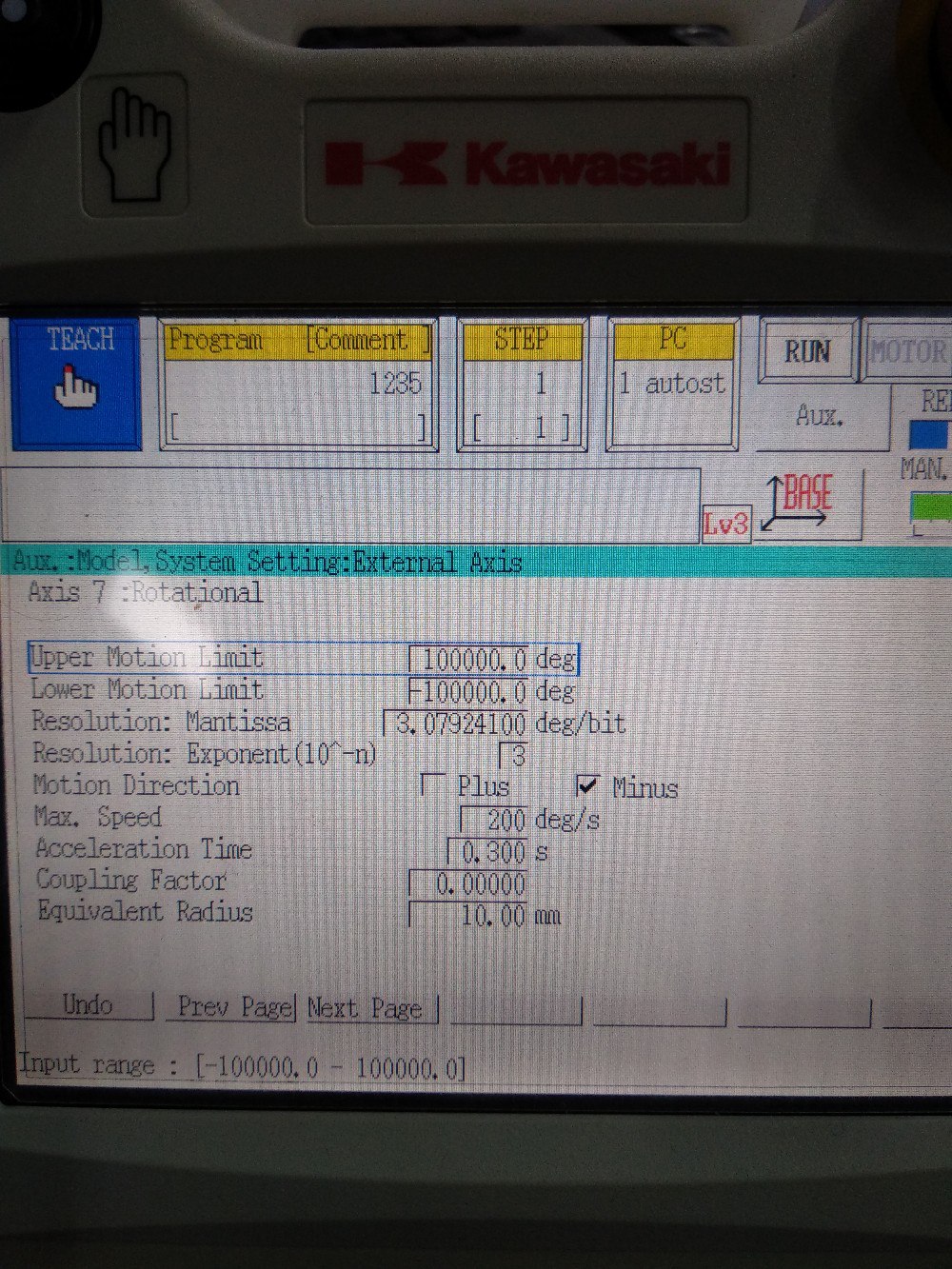
If it is custom made, have you done any testing with it to confirm the initial settings in AUX 2002 are correct:
- Such as the resolution mantissa/exponent
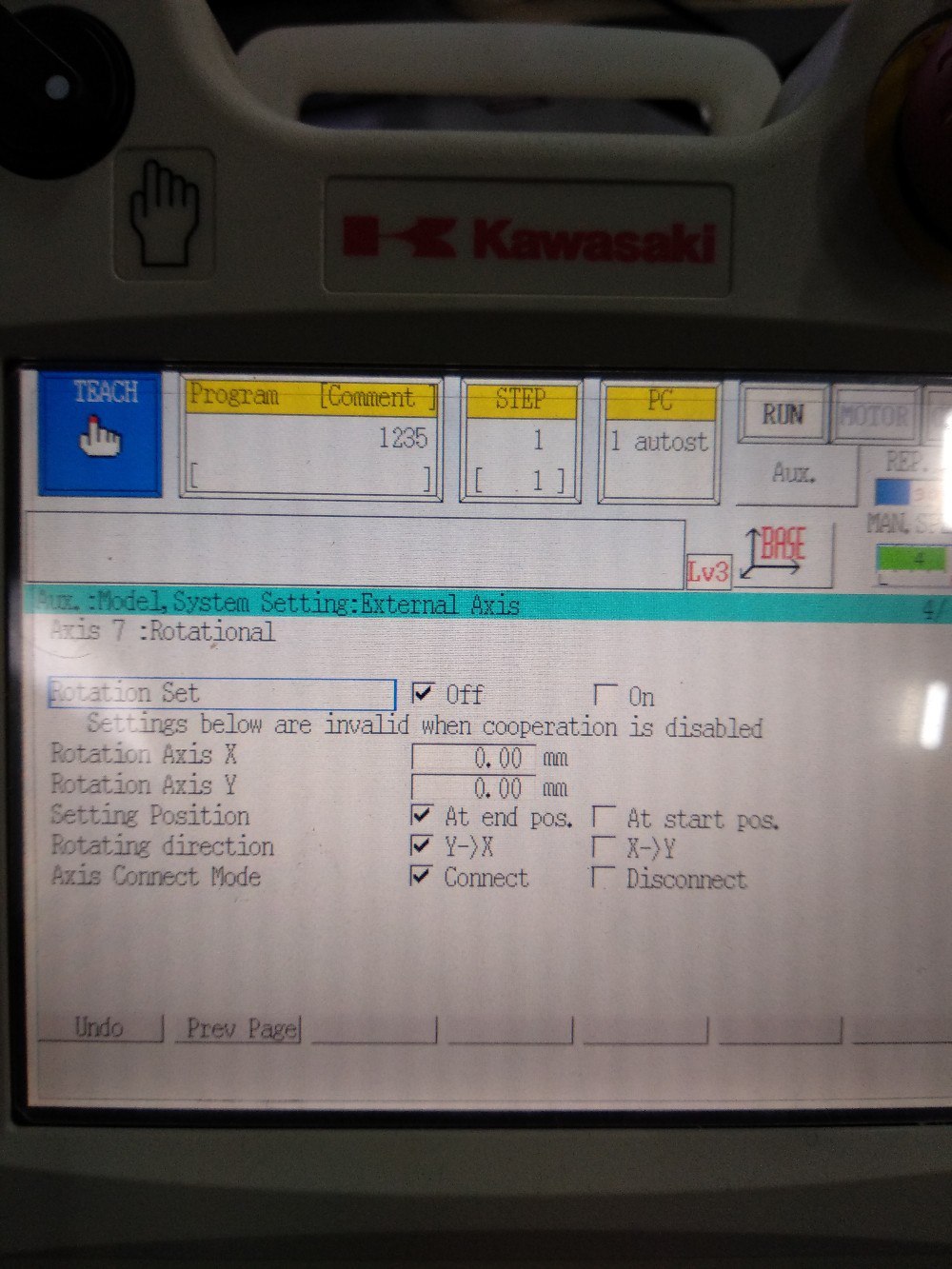
ie does the positioner move accurately.Also, in AUX 2003, you need to set the relevant option values.
- Usually just a positioner, requires the cooperation setting in Aux 2003 set - ie the location of the centre of the positioner referenced to the BASE coordinate.
- You can find this just by driving the TCP to the middle of the positioner table and using the values of XYZOAT in the axis data monitor.If you can post a full file save (you will have to change the extension to .txt), I can take a look it and may be offer some other pointers?
We appritiate your help! We took TCP to the center of positioner and uploaded coordinates to teaching pendand. I attached a picture of how this screen looks now.
I also attached a model for you to see how our welding cell lookes like in 3d. Maybe that can help to find out the coordinates nad XYZ correct directions.. In a few minutes i'll upload the file with full backup. Thank you!

-
Would be nice if you could try and comment on my other questions.......From your location data alone, you are only moving JT7.
- Have you tried doing Joint moves for the welds?
- Have you set any data in 2003 (External Axis Option)?1) Yes, joint moves work fine and we can weld this way, but without simultanious movement with positioner.
2) In External Axis Option right now everything is set to 0 -
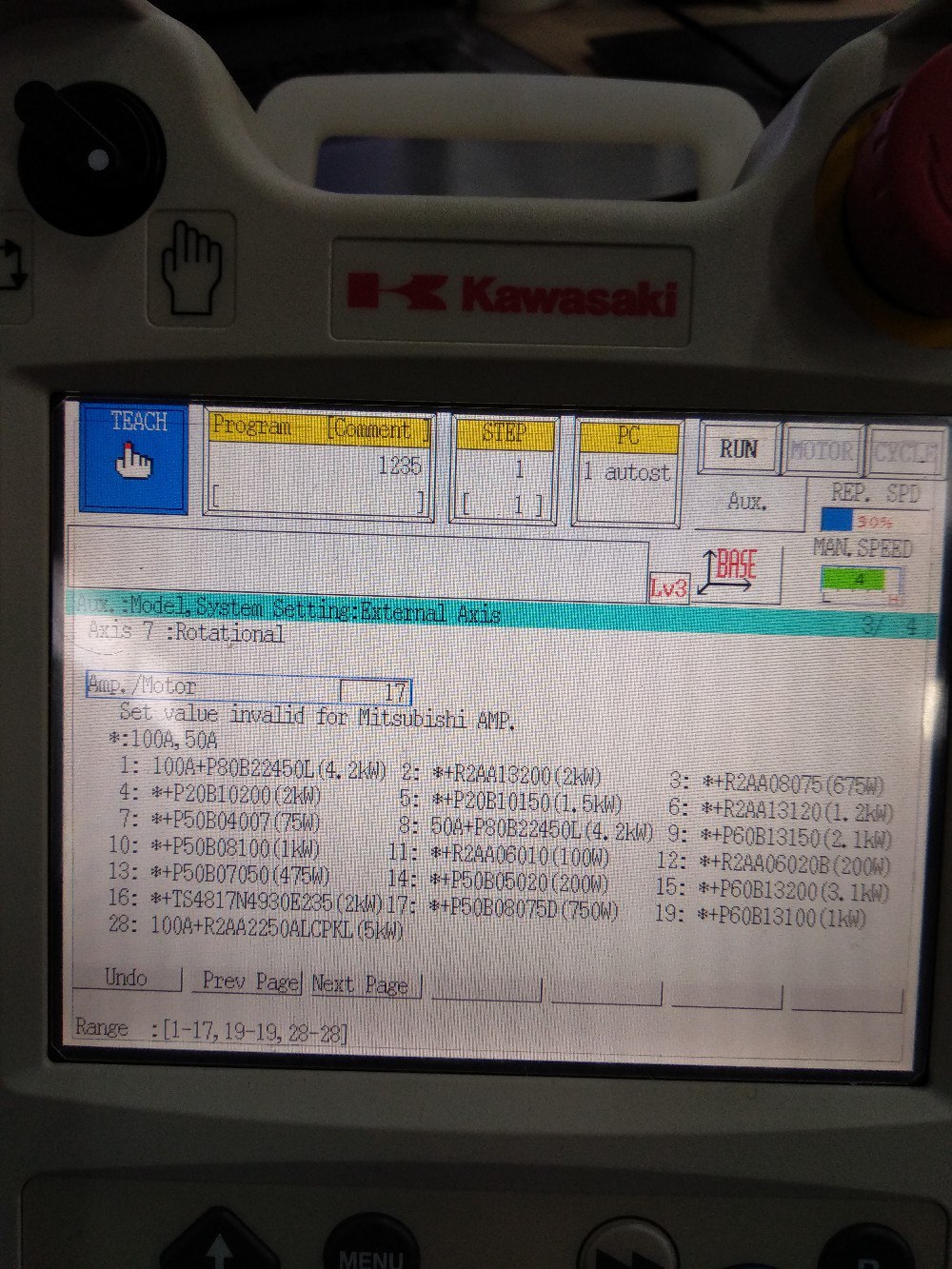
Sorry, mate. We're still working with this positioner. We cannot reach Kawasaki technical support now, cause it's sunday. We have Kawasaki motor inside the postitioner, but custom made metall body of it. Thats why they called it "non standart". The application is a robotics welding cell including Ba006n robot and horizontal positioner. Everything
works fine except this external axis. We thing that the problem is with the axis of the the psotioner, sonething is messed up with "xyzaot" coordinates of the positioner. -
So what does 'your specialist' say about this error, they must have come across this problem before?
- Not standard, can you give a description about application?Can you give an example of the program (BLOCK or AS), including positional data for JT7?
Is JT7 to be moving during the welding process, or just as a positioner (locate, then weld)?.PROGRAM pg1235() #5
AC JOINT SPEED2 ACCU4 TIMER0 OX= WX= #[-5.1166,22.445,-91.227,-2.8846,-64.335,83.301,-870.91] ;
WS LINEAR SPEED2 TIMER0 OX= WX= #[-5.0171,23.706,-95.209,-3.028,-59.089,83.506,-870.91] ;
WC LINEAR WELD_COND0 OX= WX= #[-5.0171,23.706,-95.209,-3.028,-59.089,83.507,-1275.2] ;
WE LINEAR WELD_COND0 OX= WX= #[-5.0168,23.706,-95.209,-3.0275,-59.089,83.507,-1599.7] ;
AC LINEAR SPEED9 ACCU4 TIMER0 OX= WX= #[-5.0171,22.769,-92.627,-2.9257,-62.606,83.297,-1599.8] ; -
This could be a number of things - is this definitely related to the external axis - the error code reports the JT no.
- Usually this error occurs when points are close to singularity and you are moving to a transformation location.
- The singularity causes 1 joint to change direction/speed in order to keep in sync with the other joints in order to get to the location.A better understanding and possible resolutions are always displayed in the Error Code reference (attached).
It is possible that your settings for external axis and the cooperation settings for it are incorrect.
- Who installed/set your external axis settings - I would clarify with them that the settings are correct.


Advertising from our partners






