
Thanks for this application ![]() . I try to test it soon.
. I try to test it soon.
Posts by YakawFaBB
-
-
Hey,
The external hold is control by the signal #40067 or SIN#0048 (Specific output page 6). This signal is manage in ladder program. You need to verify the wiring of your plc.
-
Hello,
You need to contact Yaskawa´s support because it´s the FD parameter that is possible only on Yaskawa mode.
You can asking Yaskawa for one time acces to enable yourself this paramater.
-

I see that YRC100micro has a Remote Programming Pendant option and I was hoping that or something like that was featured in DX200.
I don´t think that exist this option on the generation DX200. This option is available only YRC1000 or YRC 1000 micro
-
Hello,
This looks like that the robot go by singularity position, because the robot change of the configuration (front,up,no flip.)
You can verify this position right arrow + direct open.
-
Hello,
when your robot is connected, the position of your virtual robot is updated in realtime. There is not possible to run a program in reality from virtual pendant.
However the current task is displayed on a Simple PP.
-
 Display More
Display More">Hi,
We have a Fronius power source with AB Profinet RT board and will connect it to YRC1000 controller.
I will know what card need to buy for YRC1000, is it use CP1616 for this communication?
Can any one help and send manual for its setting?
With Profinet connection is it possible use ARCON and ARCOFF instruction and use ARC file for welding setting?
Best Regards
Hello,
what is the version of Fronius source ? Tpsi ?
It´s possible to communicate directly to the robot when you enable some FD parameter.
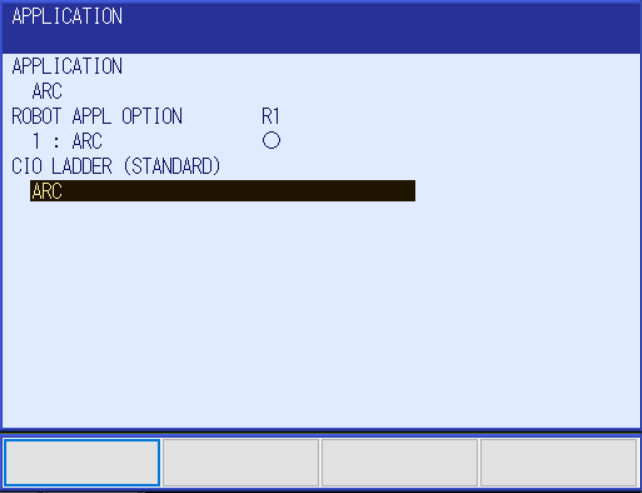
For use Arcon and Arcon you need to select the application on the maintenance mode.
-
Hello,
It´s possible with while loop, but the message will appear and disappear as long as the signal is not on.
the example program below,
NOP
WHILEEXP IN#(1)=OFF
DIALOG B050 DIALSB B051 B052 S050 B000 B000 S000
ENDWHILE
END

Have good day.
-

Motoman does offer a software called Job Editor(177921-1) that allows you to create and edit jobs among many other features. PDF for the software. I believe it requires a hardware key just like Ladder Editor and MotoSim.
Hello, it´s possible to download this software on this website https://software.yaskawa.eu.com. For Job editor you have a trial license only for 14 days
Advertising from our partners






