And what was the problem?
Some one has take off the jumper between SVOFF1 and SVOFF2 on the emergency card...
Stupid breakdown...
And what was the problem?
Some one has take off the jumper between SVOFF1 and SVOFF2 on the emergency card...
Stupid breakdown...
Hi. Which cabinet do you have?
Thanks for your response, I have soluce the problem
Hi everyone,
I have a little problem with my RJ3iB CPU,
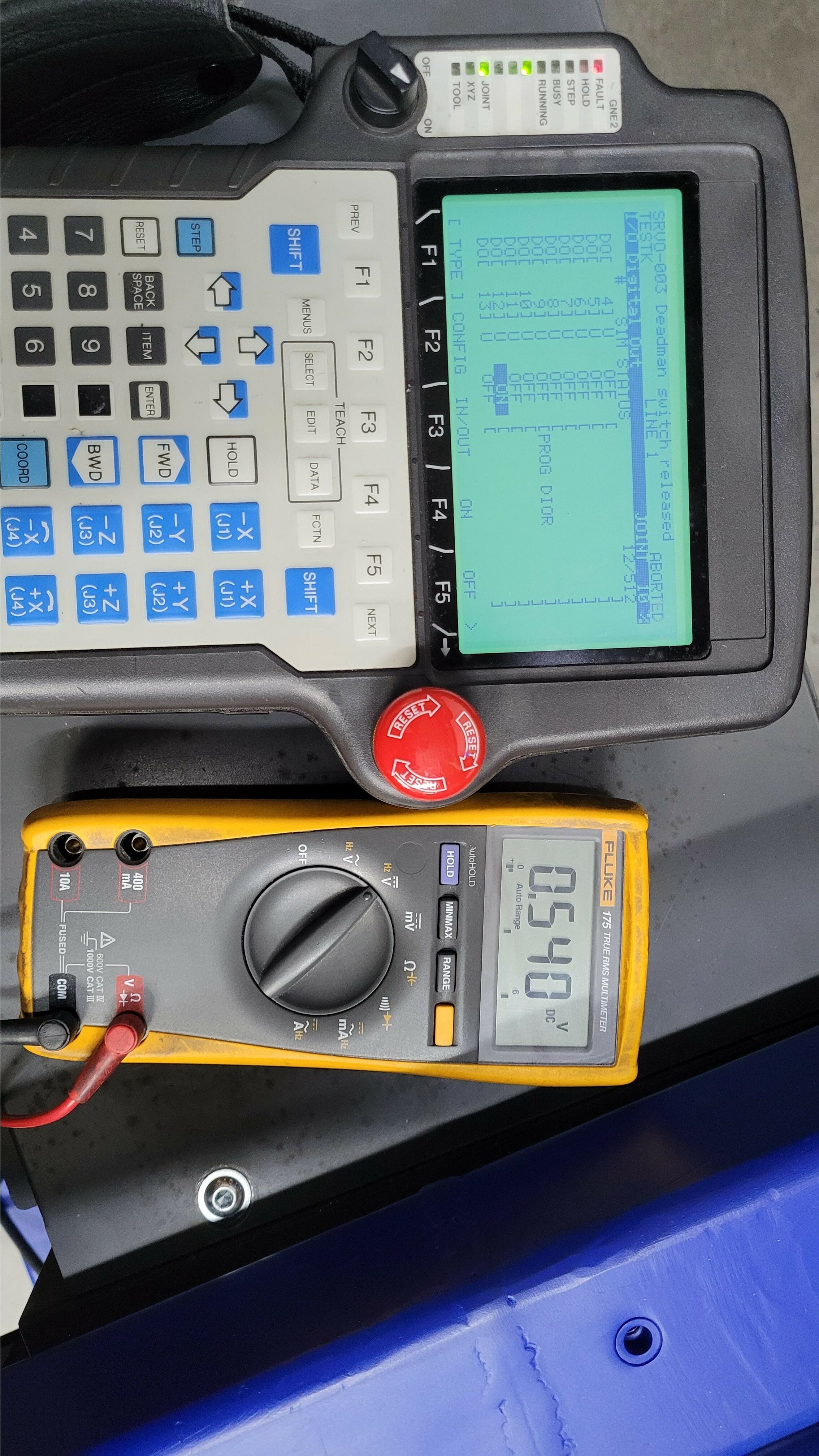
When i turn on my Digital Out of CRM79, I only have 500mV but i need 24V.
I don't understand why i have only 500mV ![]() , Do you have an idea ?
, Do you have an idea ?

Do you have any I/O interface in the robot? What kind of?
You can use any HMI - it's only a communication issue just to pass the data to the robot.
Thanks for your respons,
I have some RS232-C interface on the front of the robot controller, this RS232-C go into this connector on the CPU. 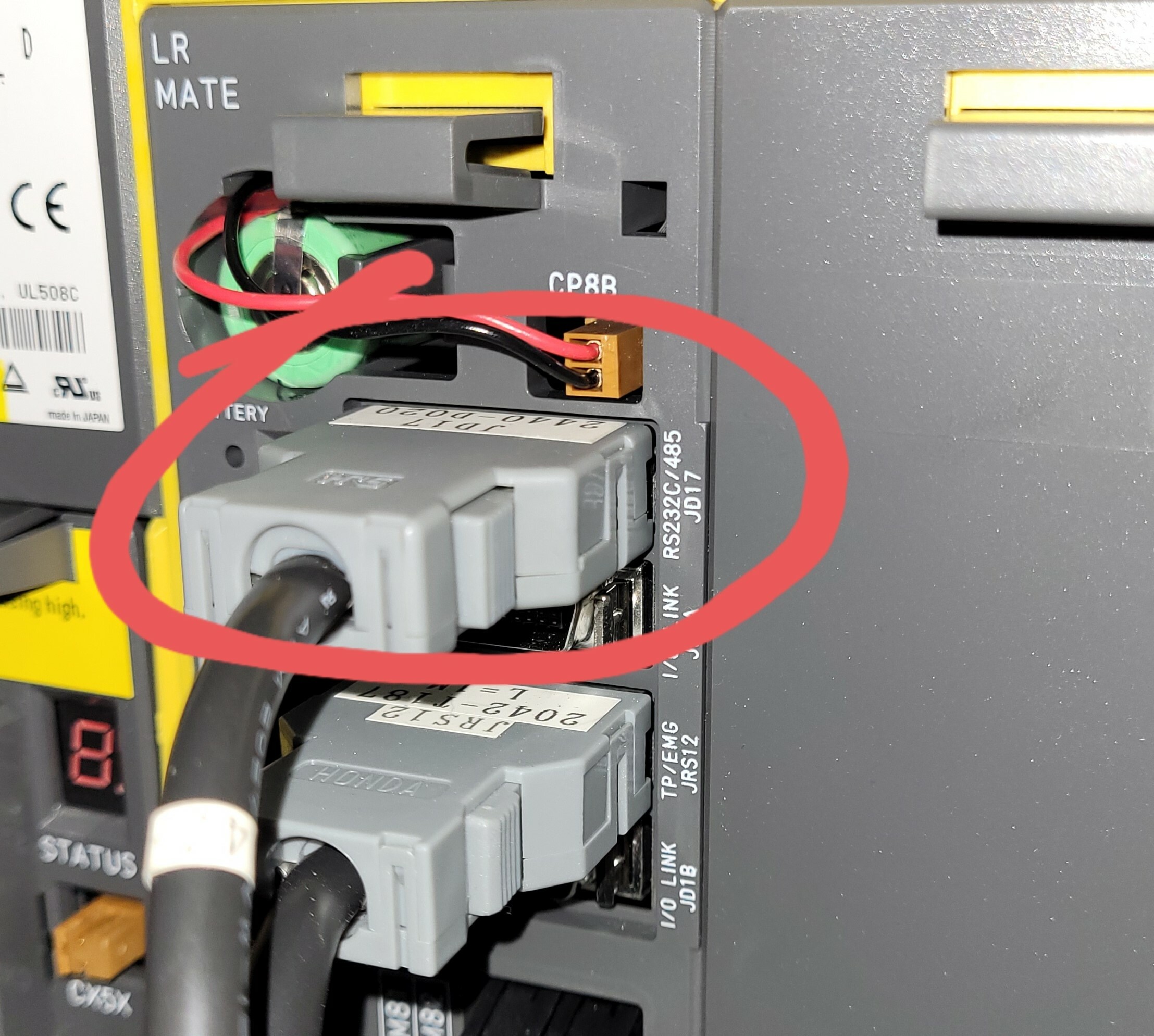
Hi everyone,
I need to add an HMI on a LR Mate 200iB with R-J3iB,
The HMI will be use for interact with the robot without passing by the teachpendant for production's employees.
Via the HMI we'll be able to change some jog point.
I did some research but i don't find if it's possible.
I need your help to know if is possible and wich HMI can do that.
Thanks for your help, have a nice day ![]() .
.

You cannot jog the robot until you clear the BZAL alarms.
I know on a few of the robots here the procedure tells you to also press the TP estop when resetting the alarm.
Joint move is possible with BZAL alarms, but when i want jog in joint the teach mark the "MCTL003" error, i thinks the problem come from somewhere else...

Did you replace the batteries?
I haven't change the batteries but is fine,
I have check the voltage and is it at 3.06 Volts.
Post a picture of the alarm history.
MCTL-003 is not a detailed error, it just means the system is in error. You must have another alarm that is preventing you from moving the robot in Joint.
Thanks for your respons.
I have only this image of my alarmes, i haven't the history, i'm not longer at my factory for today.
Hi everyone,
I'm new here, i descover this forum due to my problem, i'm a french student in a Bachellor degrees in Industrial robotics maintenance, before i start sorry for my poor english, i make my best.
For my Bachellor degrees i must realised a project in my company, the goal of this project is to (re)integrate a robot (an LR MATE 200iB), in the past this robot was use in my company but now is no longer used, so i have to reintegrate this one in a new robot cell.
To make sure the robot is in condition to work, i wanted to manipulted them, but due to multiple error i can't, in a first time i haved the error "SRVO-062 BZAL alarm" on all of my axes, i have reserch how to erase this default, i have find a procedure : Enable master in variable / menu / system/ Master cal/ F3 (Res_PCA)/ Yes / Reebot. This procedure don't work...![]()
I haved reserch an other solution... Recalibrate all axes can work ? But i haven't master reference to do this... The one solution is to calibrate all axes one by one with joint function, but when i want to move my robot with the joint function an other error appeared "MCTL-003" and i can't move my robot... I'm completly lost....
I have one small idea... Maybe one axes is in colision with other (this robot has mechanical stops), because my 6th axes is completly turne on him, but how to move the robot when one axes is in colision ?
Hoping to find a solution with you.
thanks to haved read me.![]()