you would not want someone to build your car or house without knowing what they are doing and following safety standards - someone may get killed or hurt badly. same is with industrial machines and specially robots because they can move suddenly and at high speeds.
robotic safety standards tend to call for safety circuits that are redundant and monitored (CAT 3 or 4, SIL2+)
this means use of safety rated components because they are guaranteed to fail in predictable way. this is why safety components are rated and marked accordingly.
redundant means more than one channel
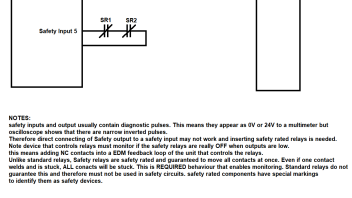
monitored means there are safety interlocks monitoring for failures. this also means preventing restart if failure was detected. there are different ways of monitoring, using diagnostic pulses or monitoring feedback loops.