Greetings everyone.
I have a KRC4 compact control system that requires the operating system to be reinstalled (don't ask why).
I found that the system drive contains three volumes which contains:
- (Drive C:) Operating system, KRC folder, etc...
- (Drive D:) KSS installation files
- (Hidden) Two .wim files with images of drives C and D
After studying the documentation and this forum, I realized that I needed KUKA.RecoveryUSB.
However, this flash drive was not bundled with my robot.
So I started looking for alternative methods and solved the problem by running a customized Windows PE image.
Moreover, Windows PE refused to boot from a USB flash drive, but it would boot perfectly from a CD (the drive was connected via a USB-SATA adapter).
I successfully deployed the main .wim-file through the deployment system inside Windows PE.
The second file was unpacked through the dism console utility.
The resulting system was successfully booted and started the necessary components, but the UploadRTOS.exe application ended with an error about the inability to deploy and start VxWorks.
I spent some time looking into this issue, and found a solution by setting a limit on the number of processor cores that Windows can use.
Intermediate conclusion: do not do like me if you do not understand exactly what you are dealing with.
Thus, the control system was fully operational after this "manual" recovery.
I went through the commissioning procedure and the robot started functioning without any problems.
After a while I returned to the question of obtaining KUKA.RecoveryUSB and found the site where I downloaded a zip package with Recovery_3.0.3.0015.cab file inside.
Then I followed the instruction from the Workinstruction_KUKARecovery30_Update_EN.pdf file.
Of course, when launching Recovery.exe from a regular (non-KUKA) flash drive, the application refused to run.
So I forced it to work.
Now the Recovery.exe program has successfully created a "self-made" KUKA.RecoveryUSB for me.
The resulting flash drive works perfectly on any computer that supports the classic MBR (Master Boot Record) boot method (including UEFI systems).
But KRC4 refuses to boot MBR code from USB flash drives.
I see three main ways to solve this problem:
- Copy my KUKA.RecoveryUSB to a CD disk (CD booting is no problem on KRC4, but I don't want to connect an external CD-ROM drive to the system again)
- Set my "self-made" USB flash drive to pure UEFI boot mode (I have already made sure that KRC4 boots successfully from any USB stick if it provides UEFI booting, I suspect that the original KUKA.RecoveryUSB does so)
- Using a special program from Fujitsu (motherboard manufacturer KRC4), and try to change UEFI settings regarding security of booting from USB flash drives with MBR
Ideally, I would like my flash drive to repeat the functionality of the original KUKA.RecoveryUSB.
I suppose that probably nobody will give me the Acronis-image of the original flash drive, but then at least I would like to know the type of its file system partitioning: GPT or MBR.
This can be done in the following way:
- Insert KUKA.RecoveryUSB into USB slot on your regular PC (not KRC)
- Open "My Computer" ("This PC" in newer versions of Windows) and search the drive (usual it labeled "KRC_ARCHIVE")
- Use right click on the drive icon to open context menu and select "Properties"
- In the drive properties window change tab to "Hardware" and select corresponding physical device (your device must be named "KUKA_USB" or something like that)
- Click on "Properties" button below
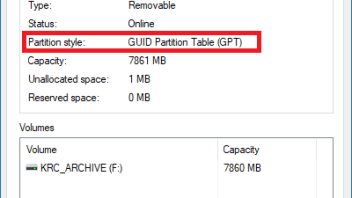
- In the device properties window select "Volumes" tab and press "Populate" button (see my screenshot below)
- Tell me the value of "Partition style" parameter or just show a screenshot of whole window
I would be happy to see your comments and suggestions.
















