
Once you put some KRL commands in the job map, I think you just have to play the simulation.
Posts by Crystal Dragon
-
-

 Display More
Display MoreHallo,
the RSI software is talking directly with the base system.
On KSS V8.3 the KLI (defining a virtual 6 for this communication) is forwarding the request to the base system.
On KRC2 machines the base system needed an extra ethernet card for this communication
Office Lite does not have the KLI and you cannot install a extra ethernet card, you only can use a program called "router.exe" to connect thru the windows network card to the shared memory.
In your second document you will find the drawing for that type of connection
regards
MOM
Thank you, I'm trying the KUKA Router right now, but for some reason UDP is not available:
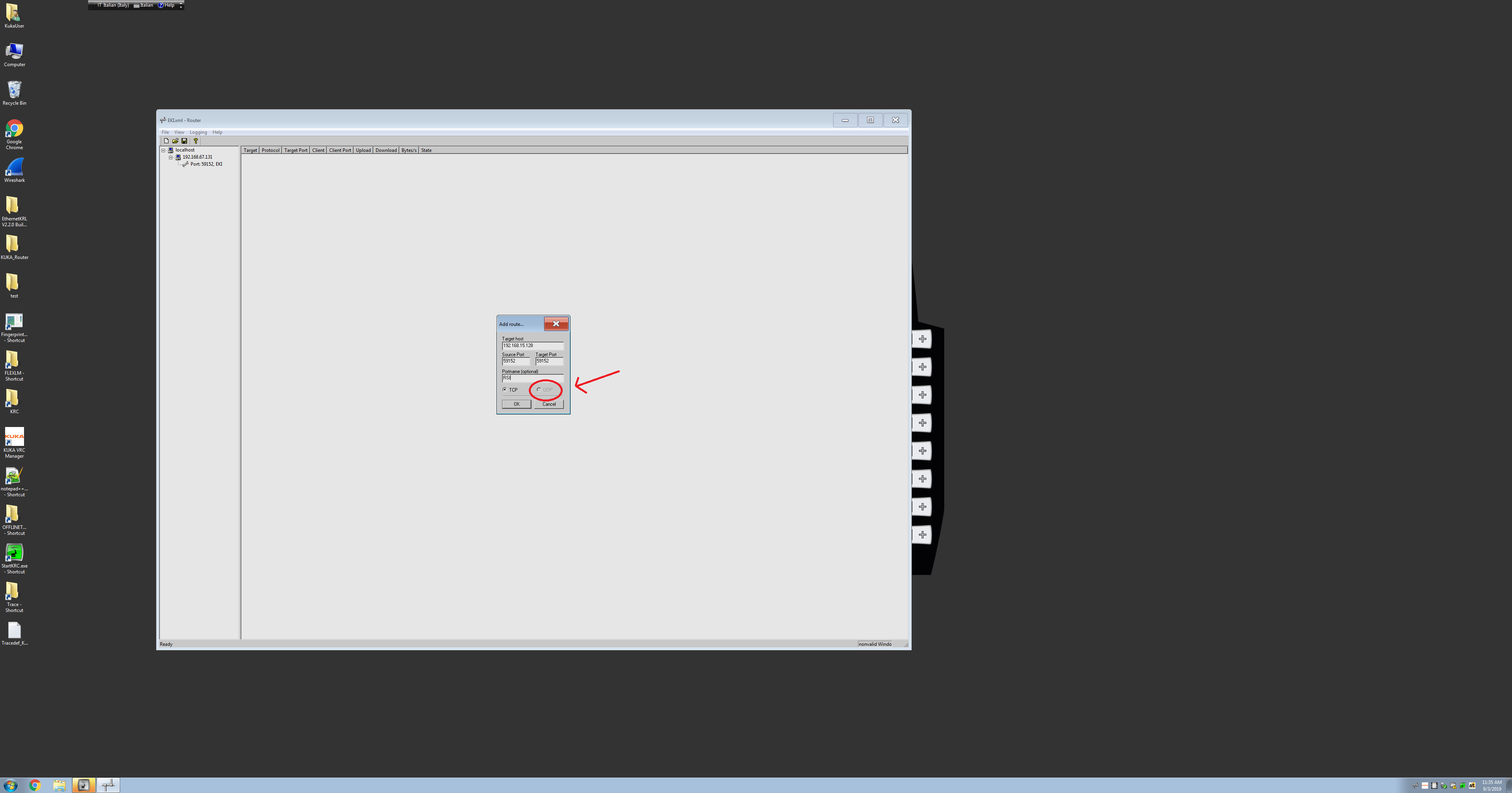
And I think that the RSI config requires UDP. Maybe I need a different Router version (this one came with KUKA.ProConOS)
-
Hello everyone, I'm trying to set-up the above-mentioned configuration, I've read differing opinions online about its feasibility, but maybe someone here could have managed to do that.
I found some works which successfully deployed RSI on OL, such:
- Development of a Robot-based Magnetic Flux Leakage Inspection System
- Implementing Multi-Touch Screen for Real-time Control of a Robotic cell
But all of them used an old KR C2 OfficeLite version.
On the other hand, OfficeLite 8.3 documentation states this:
QuoteDisplay MoreConstraints:
The following functions of the system software are not supported:...
Network connection via the KLI...
Technology packages can only be installed on the system software image if these run completely within the virtual machine and do not require any external communication.
The following technology packages cannot be used with OfficeLite:
...
KUKA.RobotSensorInterface
...Is this true? Then why older OfficeLite versions worked with RSI?
P.S: for the RSI configuration I think I did everything by the book, relying on an additional host-only network interface added in the VM for the purpose and properly configured. I tested the RSI Ethernet Example while wireshark was sniffing packets on the correct interface, nothing was sent from the SmartHMI to the host machine where the RSI TestServer was running, and the KRL program died at the RSI_MOVECORR() line after giving an RSIBad status.
-

you don't have to compile oscilloscope configuration by hand, WorkVisual includes GUI tool just for this....
I see some greyed out stuff in the workvisual editor menu (trace configuration, trace analysis), I suppose I need the connection with OfficeLite to make them available, right?EDIT: I made some tests, the time parameter is the time window of capture, I tried 300s and it just recorded the first 120, and the 12000 samples are on that window, the higher the time value, the lower is the rate. I don't know why, but I cannot change that 12000 value, or I get an error...
-
Do you mean opening the trace captured in officelite with workvisual, or connecting workvisual to officelite to record the trace with it? I once tried the connection (I have a .wvs project from a real robot), but workvisual gives an error, "SIDs of the found target did not match the SID of the device controller. IP Address not valid", but I don't know what SID means, neither where I can change it on OL or WV.
-
Hi all, I'm trying to define a new Tracedef XML file for the Oscilloscope tool, in order to generate the trace of the 6 axes (in radians) at a given rate. This is the file I'm using:
XML
Display More<?xml version="1.0" encoding="utf-8"?> <Trace xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance" xmlns:xsd="http://www.w3.org/2001/XMLSchema"> <Time>120</Time> <PreTrigger>100</PreTrigger> <Basename>KRC_MyTrace</Basename> <Modules> <Module> <Name>KRCIpo</Name> <Rate>12000</Rate> <Channel>43</Channel> <Channel>44</Channel> <Channel>45</Channel> <Channel>46</Channel> <Channel>47</Channel> <Channel>48</Channel> </Module> </Modules> <Trigger> <ModuleName>KRCIpo</ModuleName> <ID>0</ID> </Trigger> </Trace>Channels 43 to 48 are IPO_ActualValues for the 6 axes (I suppose it's what I need).
Now, I know that you can either start/stop the trace by code or by the relative buttons inside the Oscilloscope configuration menu, but there is that "Time" tag set at 120 (seconds), how does it influence the trace?
Then, there is the "Rate" at 12000, it could mean 12000 samples per second, but if I try to lower it (e.g. 1200, or even 60 which is the rate I would obtain) the trace fails with an error. Am I misinterpreting this value?
Finally, the pretrigger (%), I suppose it's a way to send the trigger and start a bit earlier the trace, it's at 100% by default, but 100% of what?Note that I can get the trace with that tracedef, and I can also plot them in matlab and the result is visually compatible with the motion of the robot during the trace, I just don't get how I could customize those three settings.
Thank you in advance

-

I've never used KUKA SimPro, but as I understand it, it only provides physical simulation of the robot (and tooling, and obstructions). As such, it does not run KRL code, or provide options like the O-Scope. However, it should provide accurate motion modelling.OfficeLite, on the other had, provides no physical simulation, but does provide actual KRL code execution, including options like the O-Scope (with the caveat that certain hardware-dependent elements, like the Fast Measurement inputs, or RSI actions, cannot be simulated by OfficeLite). While you can, technically, monitor motion in OfficeLite, those motions are apparently not very accurate.
When properly linked together, OfficeLite and SimPro are supposed to provide a nearly-complete simulation of both KRL code execution and the actual physical motion. Done properly, it should be possible to create and debug an entire set of programs in this simulation, and deploy onto the real-world robot with minimal risk of issues (as long as the simulation of the physical conditions is accurate, of course).
Thank you for the info. Just for the record, KUKA.Sim (even the trial version) CAN actually run KRL code, but you cannot load more than a single .src file (with the respective .dat) at a time. You can also import Home positions and Tool data from the config file, but after all you can't load and run the entire program structure.
-
Hi all, I'm working with gpatruno on this task, I'd like to specify that he means the usage of trace oscilloscope (opening then the trace with workvisual and trying to export to xml), which should be available on the kuka controller (and hopefully in office lite too). We don't have the access to the real robot, and we would like to know if it's possible to simulate this behaviour with KUKA.Sim full before buying the license.
Advertising from our partners






