RE: Neutral or not neutral ? Mains to KRC4 wiring
KRC4 itself does not need Neutral, it is a three phase load, so three phases and ground are all that is needed in most cases. Neutral is only needed if there is single phase load, which may be added as an option (cabinet light or service receptacle).
The three phases need to be symmetrical or balanced. This means that each phase to ground measurement is equal as well as each phase to phase measurement. Most people only measure phase to phase and this can be a problem. Normally this is achieved… panic mode
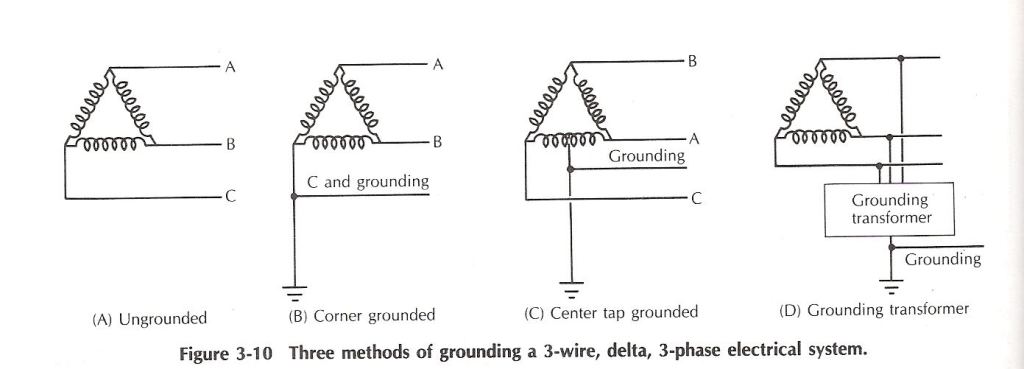
panic modeFebruary 25, 2022 at 2:20 PM Not my area of expertise, but 3-phase power can be supplied in two main ways: Delta and Y (or "Wye").
And Delta has some sub-variants, as Panic showed in his post one page up.
KRCs require Wye, not Delta. But some power grids, or building facilities, may be wired for Delta. So if your building is wired to supply Delta, a Delta-to-Wye transformer may be required between the facilities power mains and the KRC.
You'll want to run this past a professional electrician who understands the different types of 3-phase AC power. And take it from me: not all electricians actually understand this.
Thanks SkyeFire, i really appreciate the help from this forum, i always learn something new :D.