
Thank you for your offer. This is my side project doing on my own when I have some time and I don't know if I can get any funds to finish this. Especially in time when my company is looking for savings everywhere.
Posts by siwy61
-
-
I was working as a system integrator in automotive business for a few years so I know sth about robots, but the problem which i mentioned above is connected more to maintenance side and I have some gaps in knowledge.

- Are you intending in repurposing it do the same application, or do you wish it to be a 'clean' one.
I have planned to make this robot as a learning station for newbies or to improve skills of i.e. maintenance. We have a lot of robots on production line, but we have no proper learning station and sending people for training is very rare.
- Do you know what should be or shouldn't be included in a normal working system.
Yes, I do.
- Have you any backup file saves of either controller to reference to.
That shouldn't be a problem. Maintenance makes regular backups.
Quote from kwakisaki- Have you replacement batteries for the RAM and Encoders ready to install.
Yes, I have.
- Provide pictures of the inside of both controllers and I can advise further.
Maybe in 2 months i will have some time to start the switching operation, so if any further problem occurs I will write again in this post.
-
Thank you for your answer.
To be more precise.
These robots with controlles are in warehouse of my company. There were used before on production line, but contract ended. I was just wondering if I will be able from two robots with controllers make one fully working set. I know that one controller is not working, because of missing parts, but no one can assure me, if it is fully functional even with all parts inside. Also, I want to make this operation as cheap as I can, so buying spare parts is not considered.
What have Kawasaki said regarding procedure, have you asked them?
No I haven't. I thought I ask here first.
QuoteDisplay MoreThere are a lot of questions with a remark about swapping controllers in terms of electrical setup and internal programs, procedures are only applicable when replacing 'same for the same'.
So how can anyone advise, when you don't mention what missing parts there are.
- Are both robots dressed in exactly the same way.
- Are controllers electrically the same in terms of boards, safety and external IO interfacing.
ALL Kawasaki boards have (including card rack backplane) have dipswitch/jumper configurations which need to be checked and confirmed the same.
Both robots are exactly the same, no tools, no additional devices on them. S/N are 4036 and 4037. Both controllers with whole wiring and boards are also the same, as they were working on the same line with the same configuration. They were just handling robots, bought from local supplier many years ago.
According to your information in my case replacing can look like that:
QuoteIf robot is mechanically faulty, maintenance swap out old robot with new robot.
- Power up, choose arm id question to use controller side for robot model and zeroing information.
- Check mechanical zero is correct, programs and locations and then back into operation.
Assuming that controller is my base and I change robot the situation should look like written above.
-
Hi all!
I have a question to community according switching D controllers between robots ZX165.
I have two D42F-C001 controllers with ZX165U B robots, but first robot has a problem with 1st axis gear and controller from second robot is missing a lot of parts.
Can I combine working controller from first robot together with second robot?
If so, how looks that procedure?
-
Thanks a lot.
-
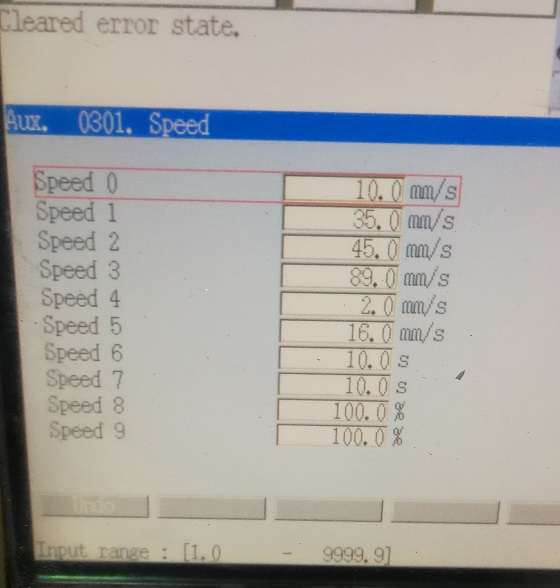
Yes, I would like to return it to percentages.
I want to make this robot as training robot so I need both ways of programming available.
Backup in attachment.
-
-
Here you have link to ABB library where you can find all the manuals:
http://www.abb.com/abblibrary/DownloadCenter/ -
Just turn ON/OFF switch into off position.
-
Hi!
You can do it with programmable button. Go to Control Panel -> ProgKeys ->Choose Key. Then choose Type: System, Key pressed: Move PP to Main.
After that, after pressing desired button, your pointer will go to the main module.
Solution works on IRC 5. -
User levels are the same as you wrote.
-
Unfortunately there isn't such option in KRCConfigurator.
Any other ideas?
-
KSS 8.3.17.
While i'm logged as an Expert i don't have any troubles. I can do everything.
How can i change Operator permissions?
-
Hey,
I've got strange problem. I can't program points while i'm in user group. Kuka shows me that message:
"Correction limitation active. Creation of new points disabled for operator"Can anyone help me with that problem? What should i do to enable creating points for operator?
-
No, motion supervision and jog supervision still will be turned off.
Advertising from our partners






