Download page --> http://linuxsand.info/fanuc_tools/frstatusviewer.html
It integrates my free alarm codes website ![]()
Steps:
- set an IP address for CD38A port (robot controller port 1) first, use ping to ensure the connectivity
- load karel\v9_bin\varviewer.pc to robot controller (v8_bin, v7_bin also provided)
- unlock HTTP: teach pendant -- menu -- setup -- HOST COMM -- 7 HTTP -- unlock KAREL:*
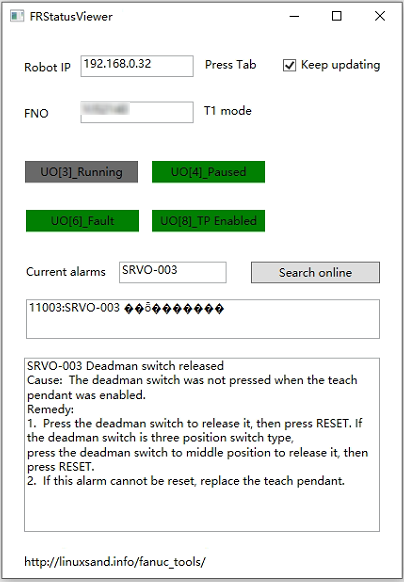
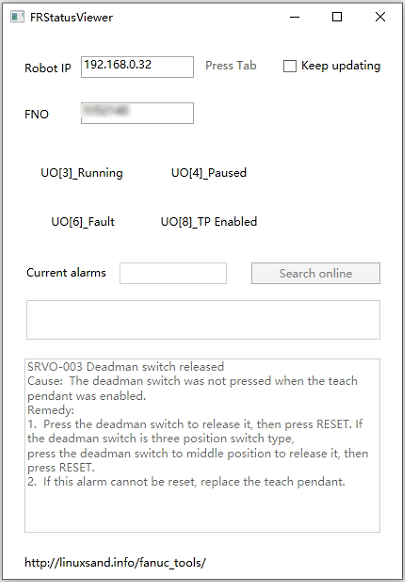
- double click _FRStatusViewer.exe, input robot ip address, press Tab key
Known issues: It will not work if UOP signals are not configed.
Note:
* We are keep improving _FRStatusViewer.exe, you may need to load newer `varviewer.pc` to robot controller after newer version released.
* _FRStatusViewer.exe runs on Windows 10. It needs .NET Framework runtime version 4.6.1 or above on Windows 7 https://dotnet.microsoft.com/en-us/download/dotnet-framework