
we have some older R-j3s doing the same, but they're modified by the company we bought them. I also have the wiring diagrams somewhere.
Posts by moln4r
-
-
There is no setting to allow this I think, it must be hardwired.
-
Check your I/O config by pressing F2 on the I/O screen
you have to see something like this:
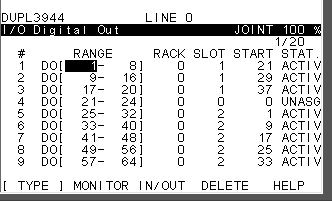
If all lines shows UNASG in the end, you don't have any Digital I/O configured.
-
or you can add a counter, and run your prg for 1 minute and there you go.
-

I'm using virtual pendant, I'm not sure it have that button. Is it servo on. Sorry for my question because I never control a real robot. All my work is simulation in Roboguidde.
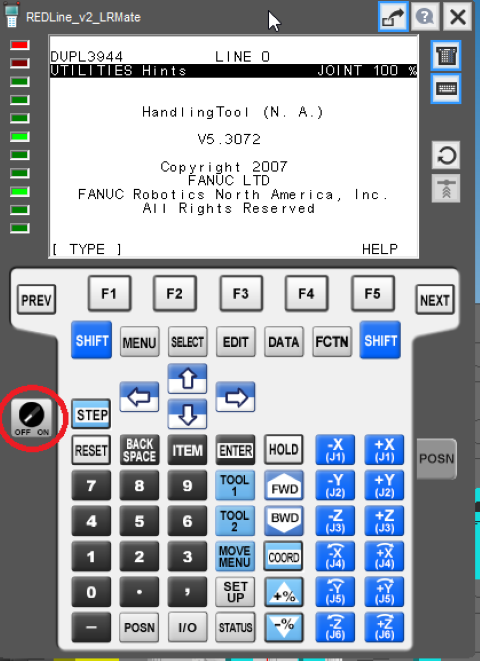
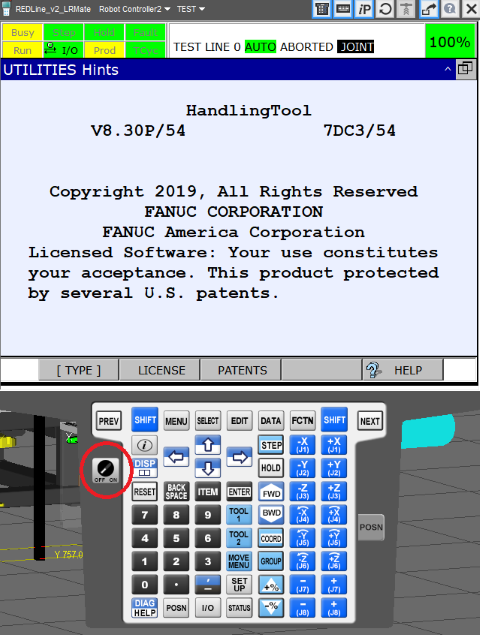
Yes, both virtual pendants have the switch:
-
This switch must be turned on -->

-
Position register 12 = Current Linear position
-
Few weeks ago I was in a very similar situation with an M20i. The screws what are holding the robot where not tightened enough and the arm moved a bit after faster movements.
-
I believe you can export the license with the license manager, than import it back after reinstall. not sure tho, never used a licensed version before.
-
Are you running roboguide as admin? I just learned last week that you have to run both the installer and the starter exe as admin. otherwise you got all kinds of errors.
-
Not the best way to achieve this but it works and it's easy to implement.
I edited your program and highlighted the changes.
F[1] Is Flag 1 what you can find on the Menu --> I/O --> Flag screen.
You can change it to any unused flag, but be careful not to use one that any other program already uses.
The program below slows down the robot to 10% when Flag 1 is turned ON and speeds up to 50% when Flag 1 is turned OFF
You, or your operator can change this while your cell is running.
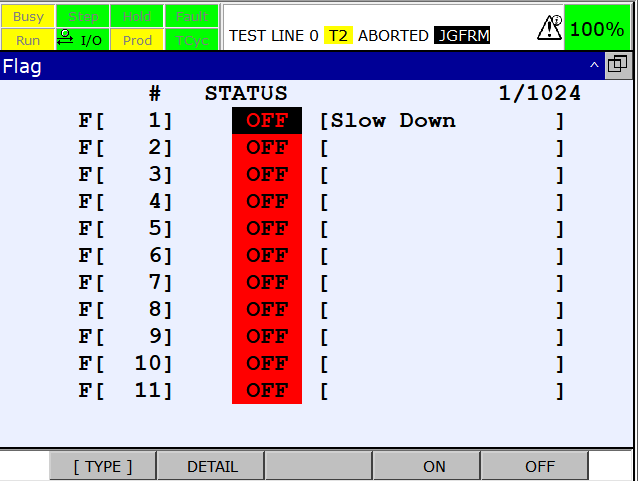
Flag screen
Edited code:1: UFRAME_NUM=1 ;
2: UTOOL_NUM=6 ;
3:J P[1] 50% FINE ;
4:J P[2] 50% FINE ;
5:J P[3] 50% FINE ;
6:J P[4] 50% FINE ;
7:J P[5] 50% FINE ;
8: DO[3]=ON ;
9: DO[5]=ON ;
10: WAIT 5.00(sec) ;
11: R[1]=R[4] ;
12:L P[6] 300mm/sec FINE ;
13: CALL DRILL ;
14:L P[7] 300mm/sec FINE ;
15: if (F[1]) THEN
16:J P[8] 10% FINE ;
17:J P[9] 10% FINE ;
18:ELSE
19:J P[8] 50% FINE ;
20:J P[9] 50% FINE ;
19:ENDIF
22:L P[10] 300mm/sec FINE ;
23: CALL DRILL ;
24:L P[11] 300mm/sec FINE ;
25:J P[12] 50% FINE ;
26:J P[13] 50% FINE ;
27:L P[14] 300mm/sec FINE ;
28: CALL DRILL ;
-

Are you able to see the Add Robot option if you Right Click an existing robot controller in the navigation tree? If not, I'd make sure you have the most up to date version and are running the program as administrator.
Thanks, no I don't have the option nowhere. I managed to add the 2nd robot by constantly clicking on the "add robot" option while the cell loads. The window came up before the menu disappeared
 I think the problem is the admin rights but I cannot test it right now.
I think the problem is the admin rights but I cannot test it right now. -
Hello guys,
I'm sure I'm missing something obvious, but I can't find a way to add a second robot to a roboguide cell. Is it possible?
I found some info in roboguide help it says:
Adding copied virtual robots to a workcell:
-
On the Cell menu, select Add Robot > Add Robot Clone.
The Add Robots window will appear.
-
Select the base robot.
This is the robot controller that is copied.
-
Select the number of controllers to add.
The problem is that I don't have the "Add Robot" option in the cell menu.
Thanks.
edit: It looks like the "add robot" menu is there when I open up the program, but it disappears once I open up the cell.
Any ideas?
-
-

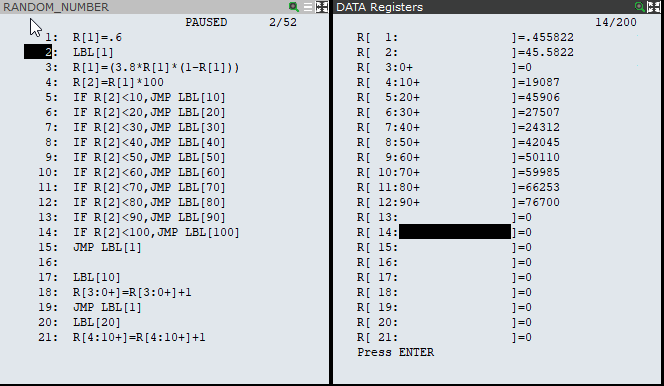
Here is a pseudo random number generator equation I wrote for a client a while back. It will output a number between 0 and 1. You just have to seed the equation first with something. 0.6 works pretty well.
I learned about that formula from this YouTube video:
https://www.youtube.com/watch?v=ovJcsL7vyrk
It was a very interesting watch.This looks really interesting!
made a test with your code, and it looks like it never gives numbers below .1 (actually .18 I think) Am I missing something?
-
Why r u using fctn+abort all in the first place? Why not the cycle stop signal? with the cycle stop/start signals you can do exactly what you need.
-
Good to know! Thanks for the info.
-
If the above settings are correct and you send UI6 to the robot it will start the main program from line 0. May you can send it with your "reset robot" button.
-
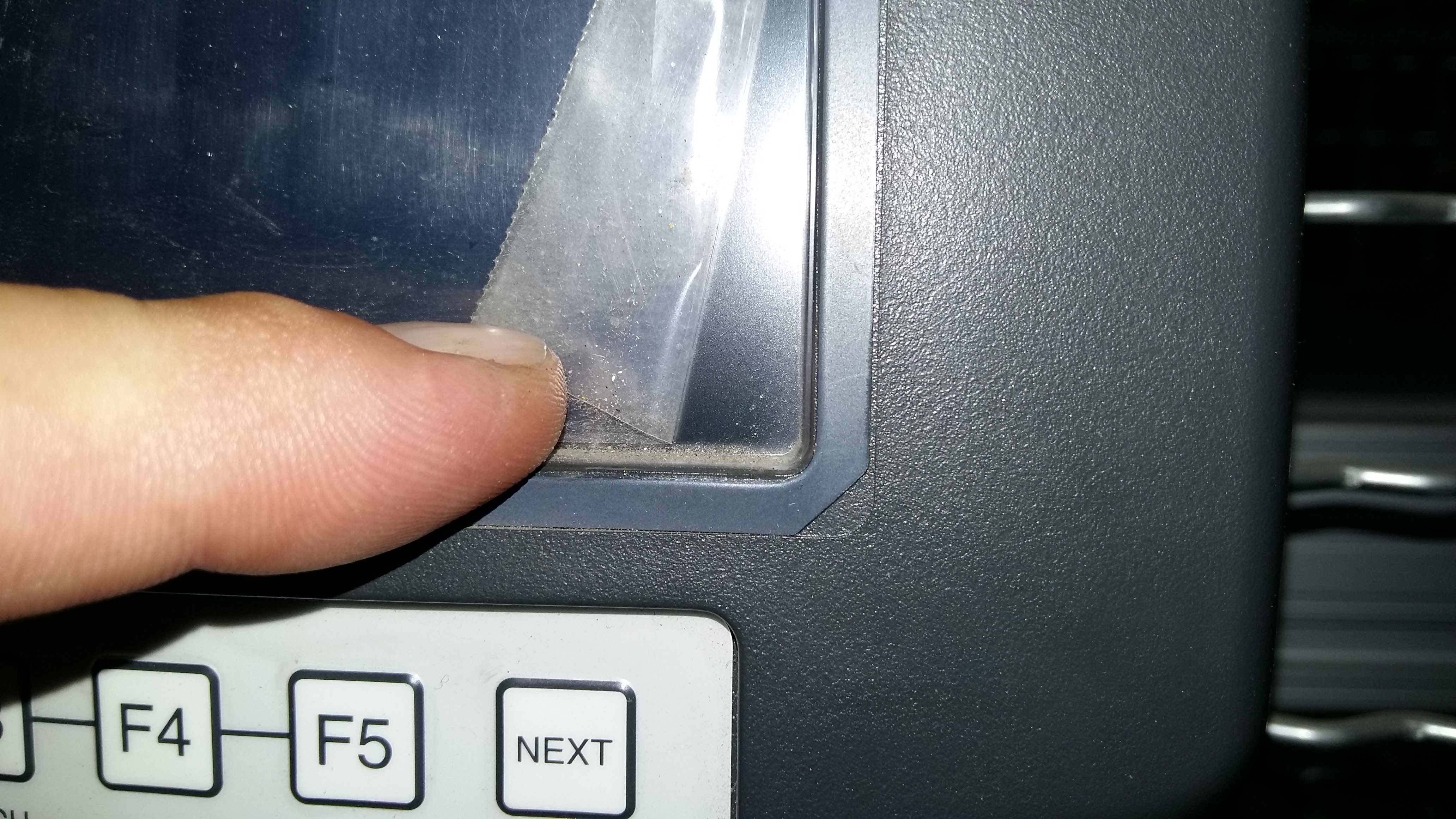
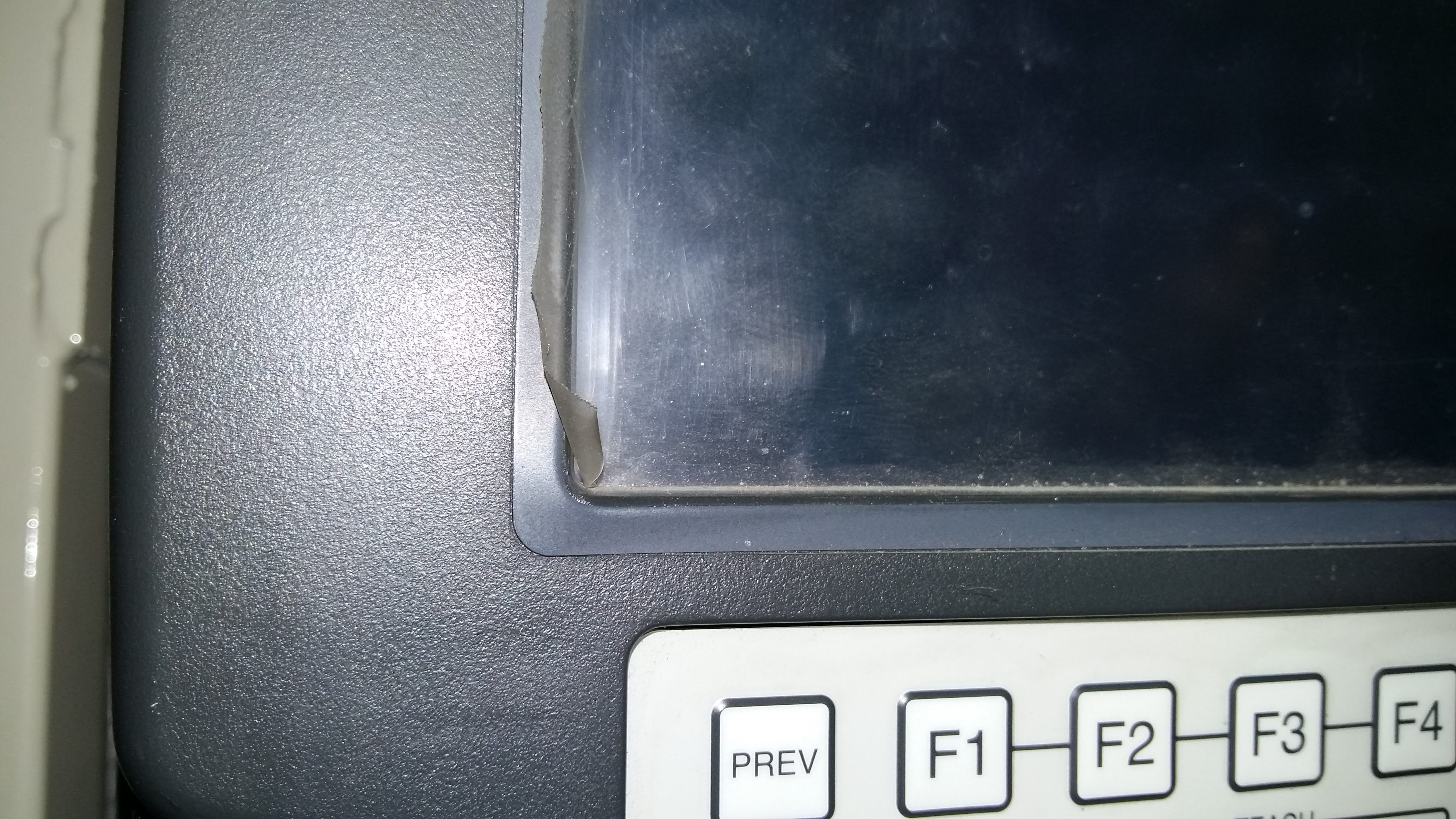
I think that is part of the screen. At least on our pendants the screen protectors are only on the "flat surface" checked our pendants, one or two of them definitely have the same frame like yours and it's not part of the protector:
-

In that situation you could set a register equal to this system variable
-

I have this material about my robot, but I don't see the gear ratio. I was worried because my English was not good, I missed it. You can see if I can ignore them or not! TitusLepic!
Please read this -->
Advertising from our partners






