

Are you saying you started first time with admin but if you shutdown ROBOGUIDE and opened later without admin rights it worked?
Thanks.
Yes, exactly. It looks like once you open a cell with admin rights, the problem dissappears.
Are you saying you started first time with admin but if you shutdown ROBOGUIDE and opened later without admin rights it worked?
Thanks.
Yes, exactly. It looks like once you open a cell with admin rights, the problem dissappears.
You have to go to Menu-->File-->F5[Util]-->Set Device-->Change to FR
If you did an "init start" and don't have backups, than I'm afraid you lost your programs.
maybe there is a system variable where you can set the mm/s speed when in teach mode?
Did you checked BG logic?
not the override speed, a speed value in the program you can see it on the screen there must be a position in line 7 where the speed is probably 0 or it is a register wich is 0
Hi!
I'm messing with fanuc robots for more than 10 years. But most of the time I integrate robots for simple pick and place applications, as injection molding machines and such. Normally I just use a measuring tape to set the tcp ![]() but I'm sure there are some more accurate methods to do this correctly. Of course I also use roboguide for this but I'm curious what are the best ways to set the tcp.
but I'm sure there are some more accurate methods to do this correctly. Of course I also use roboguide for this but I'm curious what are the best ways to set the tcp.
More information on the macro screen, show wich one is executing and current line number.
As a temporary solution you can create a new point with the correct position and copy the position data manually to the point where you need it, than delete the newly created point. Never heard about this problem btw
Hi all,
The measurement tool stopped working after a few days of working in roboguide.
Yes the istaller and the program was started with "run as admin"
Anyone experienced this error?
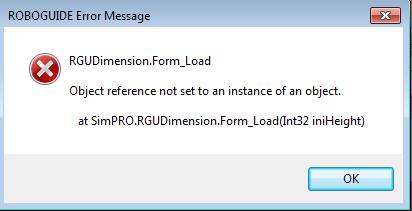
After I click ok, the window opens but the object list is empty, and nothing works.
Any ideas are welcome
EDIT: Created a new cell, and the tool work fine. Loading back my original cell makes it corrupted again ![]()
EDIT2: Created a new cell than used the File/Import workcell option and it's solved the problem.
We have 4 r30ib mate and ib mate plus controllers, none of them have the cycle power menu. Last time I saw this menu was on an r30ia (not mate).
I think there is a setting for that in roboguide, can't remember where, but I think you can disable it.
also try to compare the settings with the other robots in menu/system/config: min/max of acc instruction.
if this setting changed, it can cause similar problems.
The solution is BG_Logic for sure. Actually you can run TP programs in bg logic, but there are limitations, no motion commands, no WAIT instructions, older models doesn't let you use jumps etc. But bg will run continuously when the controller turned on.

No need for KAREL, TP supports this:
IIRC, the $WAITTMOUT variable is set in 0.1sec, so that "150" would be 15sec. You'll need to set it to the value you want in your program. The TIMEOUT is a standard option of the WAIT command. If the timeout, er, "times out" before the WAIT condition is satisfied (RI 1 in this example), then the program will jump to LBL 100.
Are sure about the 15 sec?
May I'm wrong but I think 150 = 1,5 sec
If I understand correctly than yes, there is a function to do exactly that.
First you set a timeout:
$WAITTMOUT=300 ; in this case it's 3sec.
than add a line:
WAIT DI[x]=ON TIMEOUT,LBL[1000] ;
I assume all your taught points are off on the exact same level. One easy and fast solution can be adjusting the tool frame to match your original points. If you adjust the tool frame all your points what you taught before going to get shifted.
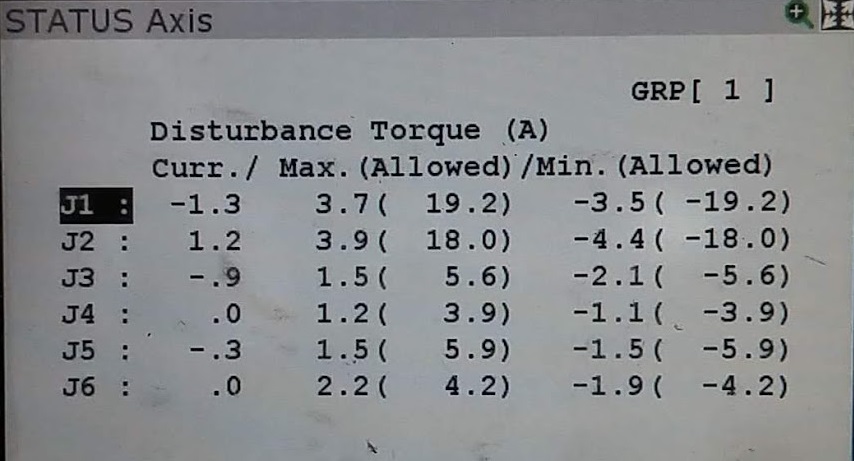
You can also check the disturbance in menu > next > status > axis. You have to see DISTURB above the F4 button if I remember right.

Cant confirm if this problem just started or it was just recently noticed. moln4r How did they modify to bypass auto?
Sry I don't have access to the docs rn.






