









Configuration (mechanical)
2 KUKA KR8 R2010-2 robots hang reversed (assembling to the celling) on a platform, this platform moves as an external axis (linear unit).
Robot Nr.2 has actually control of this linear unit. Robot Nr.1 doesn’t have any connection to the linear unit.
When the external axis (linear unit) moves, bases (Robroot) of both robots will be shifted.
Cell configuration on WorkVisual 6.0
">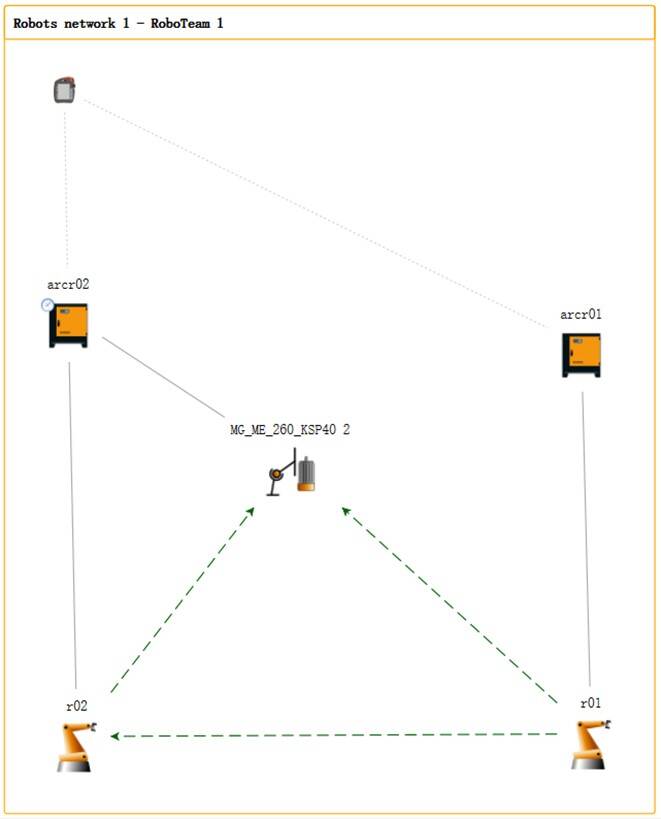
2 Robots are in 1 Roboteam, with Robot Nr.2 Master, Robot Nr.1 Slave.
I let both robots follow the linear unit, instead of place any robots on the external axis’ flange.
I assigned the calibration data from Ext. kinematic systems to base 17.
Explain:
If I place both 2 robots on the external axis’ flange, after I use “Start-up----Calibrate----Linear Unit” and input the calibration data, error KSS12032 "Robot Controller <-> safety controller, Cart. position deviation"
will pop up instantly, so I can’t move the robot anymore until I delete this data.
If I place 1 robot (Nr.2, the Master) on the external axis’ flange, the calibration will work, but Robot Nr.1(Slave) will be handled as a robot with fixed base, instead of shifted by the external axis.
How the arc welding process works (supposed to be)
2 robots should weld almost simultaneously from both side of work-piece, and move cooperative with the linear unit, it means, the platform moves on the welding(seam) direction, and the robots themselves only move (or shake) their TCP (point of torch) to make the weaves but not for other further motion.
What’s the Problem?
When Slave Robot using weave setting without weave delay, it works fine.
But if I add any weave delay on it (no matter for 1 side or 2), the TCP of Slave Robot will moves on a straight line during ARCTECH cmd (I used LIN motion for ARCOFF/ARCSWITCH, as you can see in the followed cmds), there is no weave anymore, and of course no weave delay.
There was NO messages or errors on both robots. They ran the cmds from start to end without any stop.
*Other notices
If I turn off ArcSense for both robots (just for a try), the weave and weave delay will be proceed, but in an odd form, which the delay not suiting the weave frequency, TCP often stops and delays when the weaves not in peak. If I only run 1 robot (e.g. the Slave Robot), the weave will be finally normal, but this time there is no moving from linear unit.
And ArcSense is necessary for my arc welding situation so I shouldn’t turn it off in any circumstances. I need to keep it on.
Command for example (simplified)
By the way, both robots use the same setting on ArcTech commands, I have the exactly same Robot velocity (on Weld parameters), and exactly same weave pattern/length/deflection/angle/weave delay (on Weaving).
Weave pattern was ArcSense-Triangle, I also tried other weave pattern but got nothing else.
For Master (Robot Nr.2)
INI
SPTP HOME Tool[1] Base[0]
ARCON TRACK WDAT1 LIN P1 Sync=a→1_2 Tool[1] Base[17]
ARCOFF TRACK WDAT2 LIN P2 Sync=b→1_2 Tool[1] Base[17]
LIN P3 Sync=c→1_2 Tool[1] Base[17]
LIN P4 Sync=d→1_2 Tool[1] Base[0]
SPTP HOME Tool[1] Base[0]
For Slave (Robot Nr.1)
INI
SPTP HOME Tool[1] Base[0]
ARCON TRACK WDAT1 LIN P1 Sync=a→1_2 Tool[1] Base[17]
ARCOFF TRACK WDAT2 LIN P2 Sync=b→1_2 Tool[1] Base[17]
LIN P3 Sync=c→1_2 Tool[1] Base[17]
LIN P4 Sync=d→1_2 Tool[1] Base[0]
SPTP HOME Tool[1] Base[0]
System and software version
System KSS8.6.8
ArcSense 3.3.1.14
ArcTechAdvanced 3.3.1.22
ArcTechBasic 3.3.4.387
ArcTechMultilayer 3.3.1.11
RoboTeam 3.1.2.38
SeamTech Tracking 3.1.3.50
SeamTech Finding 3.1.0.22
TouchSense 3.2.2.154





