Hello all.
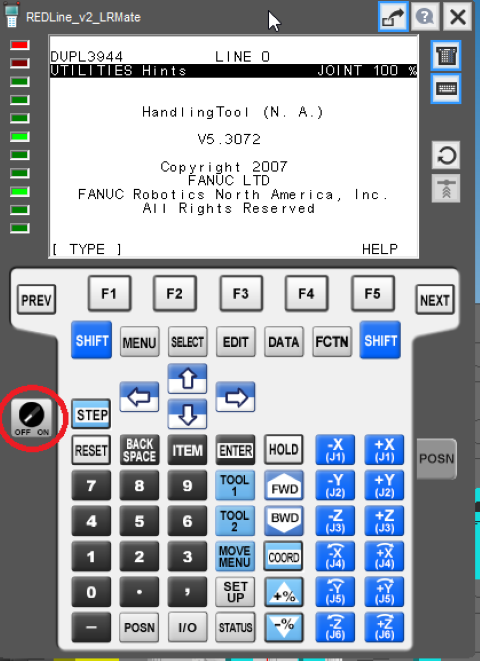
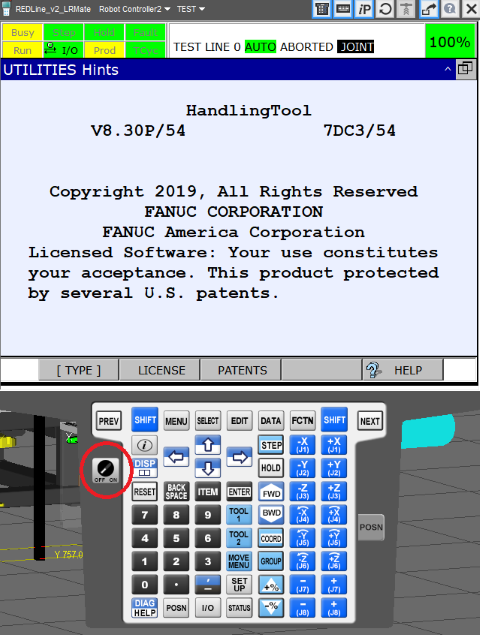
I am using a Roboguide. I have a TP program and I want the robot move to each step by step in that program. I turn the program into Step mode and click each step. But the robot doesn't move to those steps. I read in tutorial that I need to press deadman switch. But I am using virtual pendant and can't find any deadman switch. May you tell me how to do that.