Devices in a fieldbus are assigned roles. Basically each of them is either master or slave. normally a bus has master with one or more slaves.
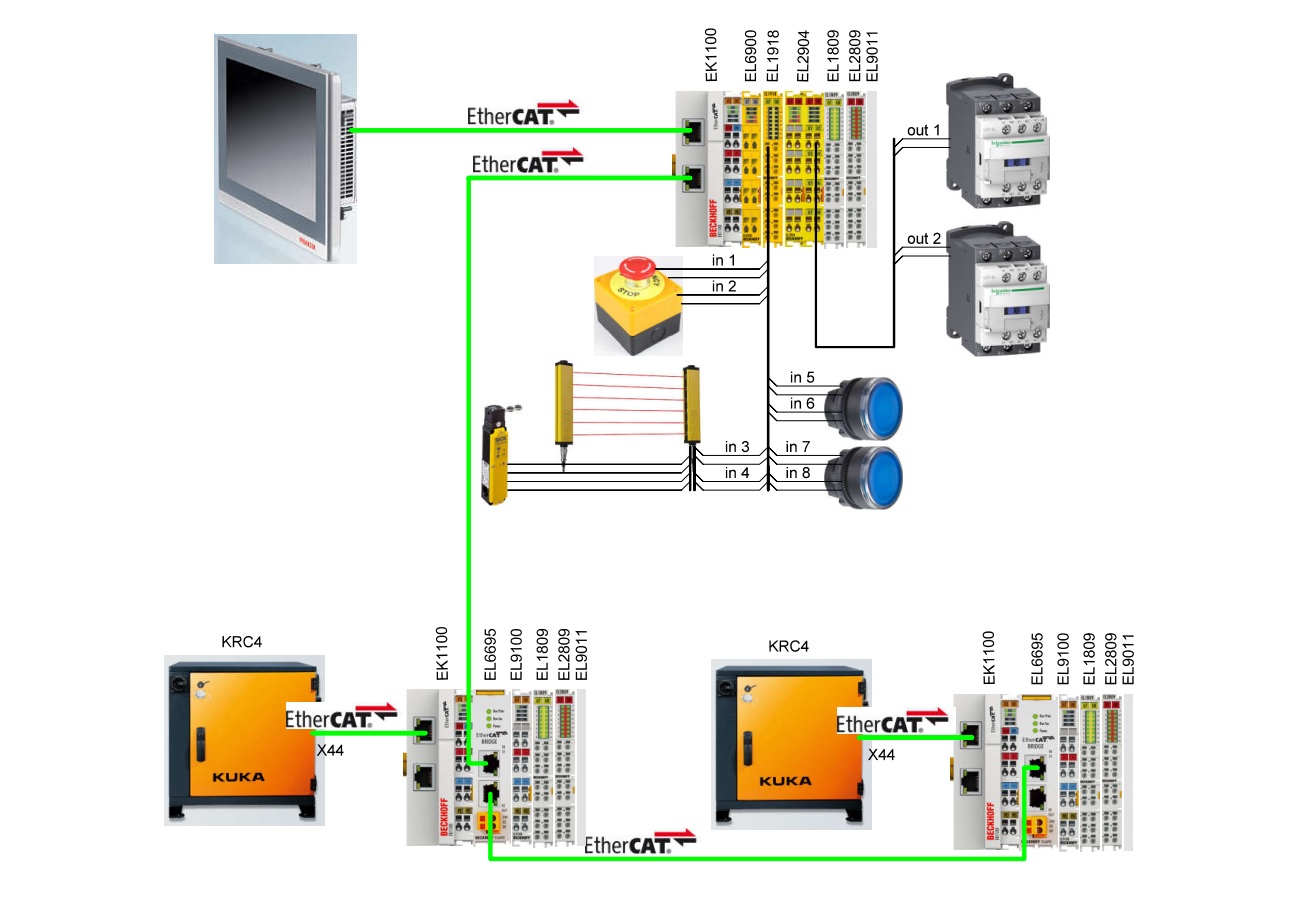
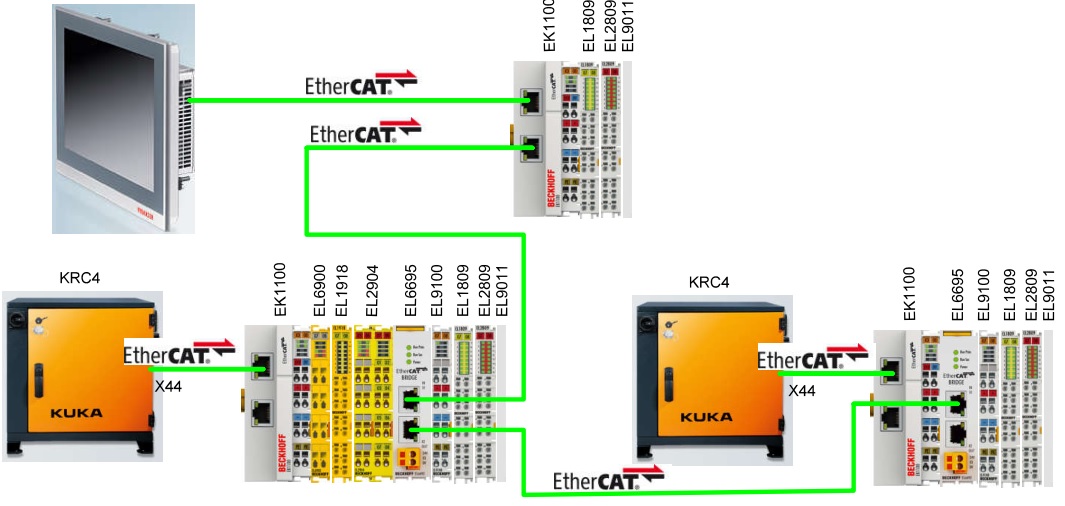
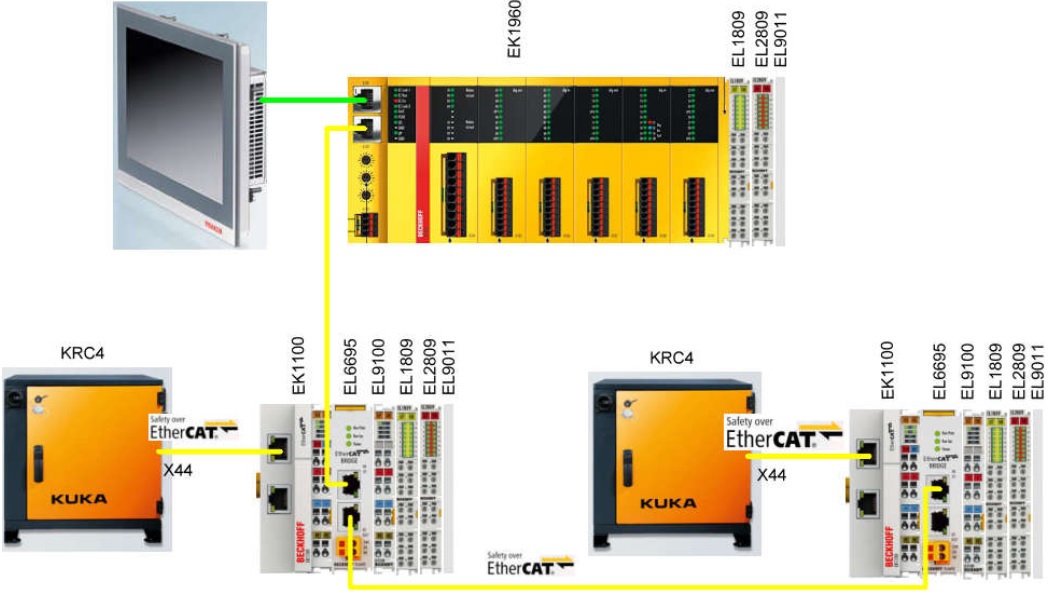
When it comes to EtherCat, KRC4 implements only master. But safety PLC must be a master. So solution is to create two networks (one controlled by PLC, and other by KRC4). Two networks are connected by bridge. When there are several robots each of them will need a bridge.
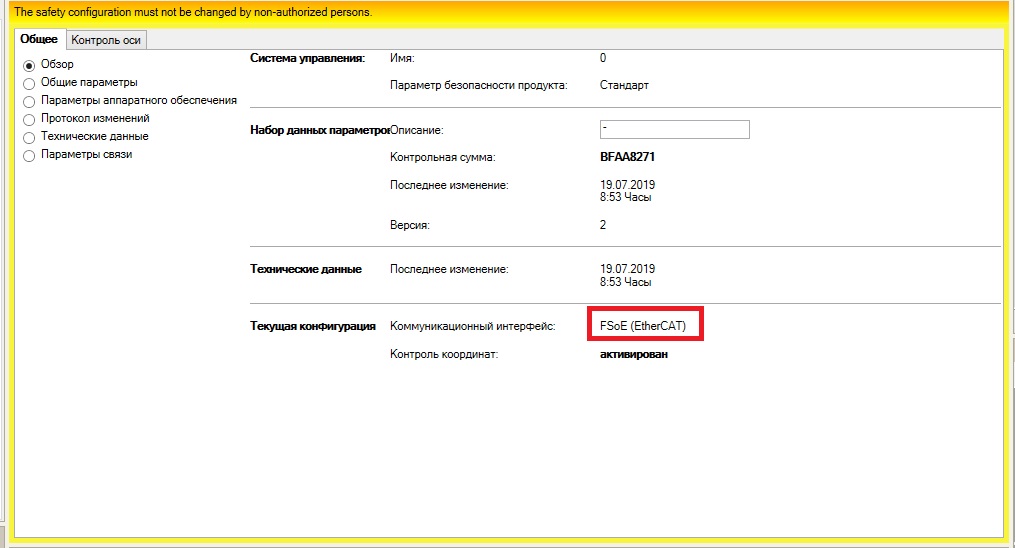
Btw to use FSoE, special bridge is required - one that is offered by KUKA: EL6695-1001. Others can be used too (like plain EL6695) but only for standard data, not FSoE. Even bridge from KUKA must be connected certain way when using FSoE.
This means that bridge ports (secondary) connect to PLC controlled network. Primary side (accessed through EK1100) must connect to network controlled by KRC4. Other IO modules are optional.
This means that bridge ports (secondary) connect to PLC controlled network. Primary side (accessed through EK1100) must connect to network controlled by KRC4. Other IO modules are optional.
I have a poor command of English. I'm checking.
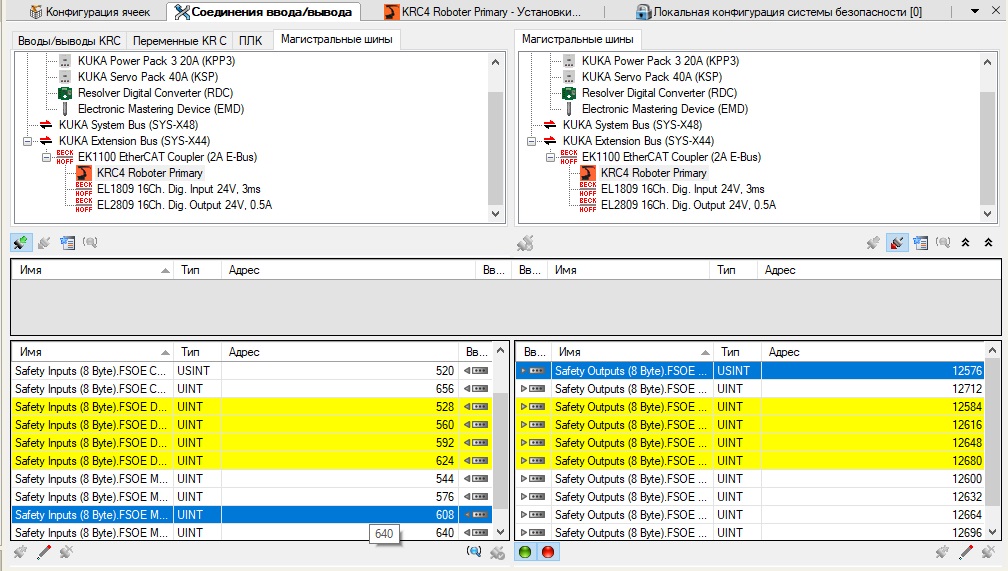
EL6695-1001 connects to EK1100 via EBUS (EK1100 is connected to KRC4).
EL6695-1001 is connected to the PLC network via EtherCAT.
Even bridge from KUKA must be connected certain way when using FSoE.
Are you talking about the physical connection or the software part?
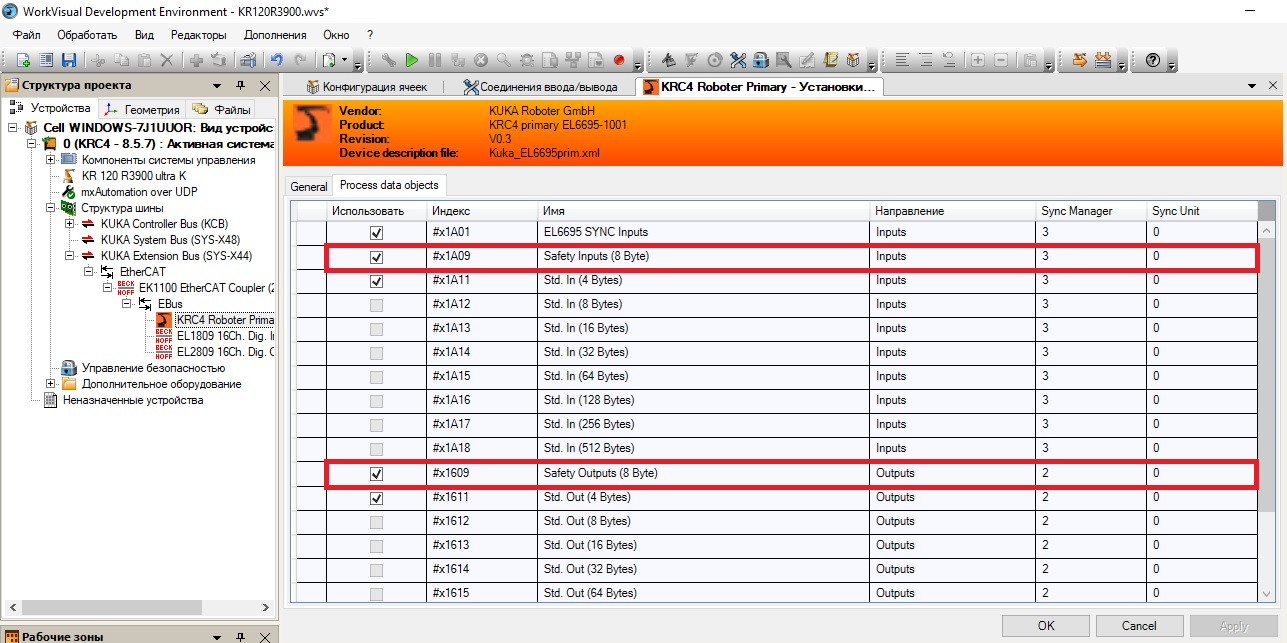
In the software part, as I understand on the robot side, you need to put the Safety checkbox in EL6695-1001 and remove the SIB Board. You don't need to do anything else programmatically in the robot?
Physically, you need to disable the SIB Board and remove the jumper.











 ">
"> ">
"> ">
"> ">
"> ">
">



