Hello everyone, I'm trying to set-up the above-mentioned configuration, I've read differing opinions online about its feasibility, but maybe someone here could have managed to do that.
I found some works which successfully deployed RSI on OL, such:
- Development of a Robot-based Magnetic Flux Leakage Inspection System
- Implementing Multi-Touch Screen for Real-time Control of a Robotic cell
But all of them used an old KR C2 OfficeLite version.
On the other hand, OfficeLite 8.3 documentation states this:
Constraints:
The following functions of the system software are not supported:...
Network connection via the KLI...
Technology packages can only be installed on the system software image if these run completely within the virtual machine and do not require any external communication.
The following technology packages cannot be used with OfficeLite:
...
KUKA.RobotSensorInterface
...
Is this true? Then why older OfficeLite versions worked with RSI?
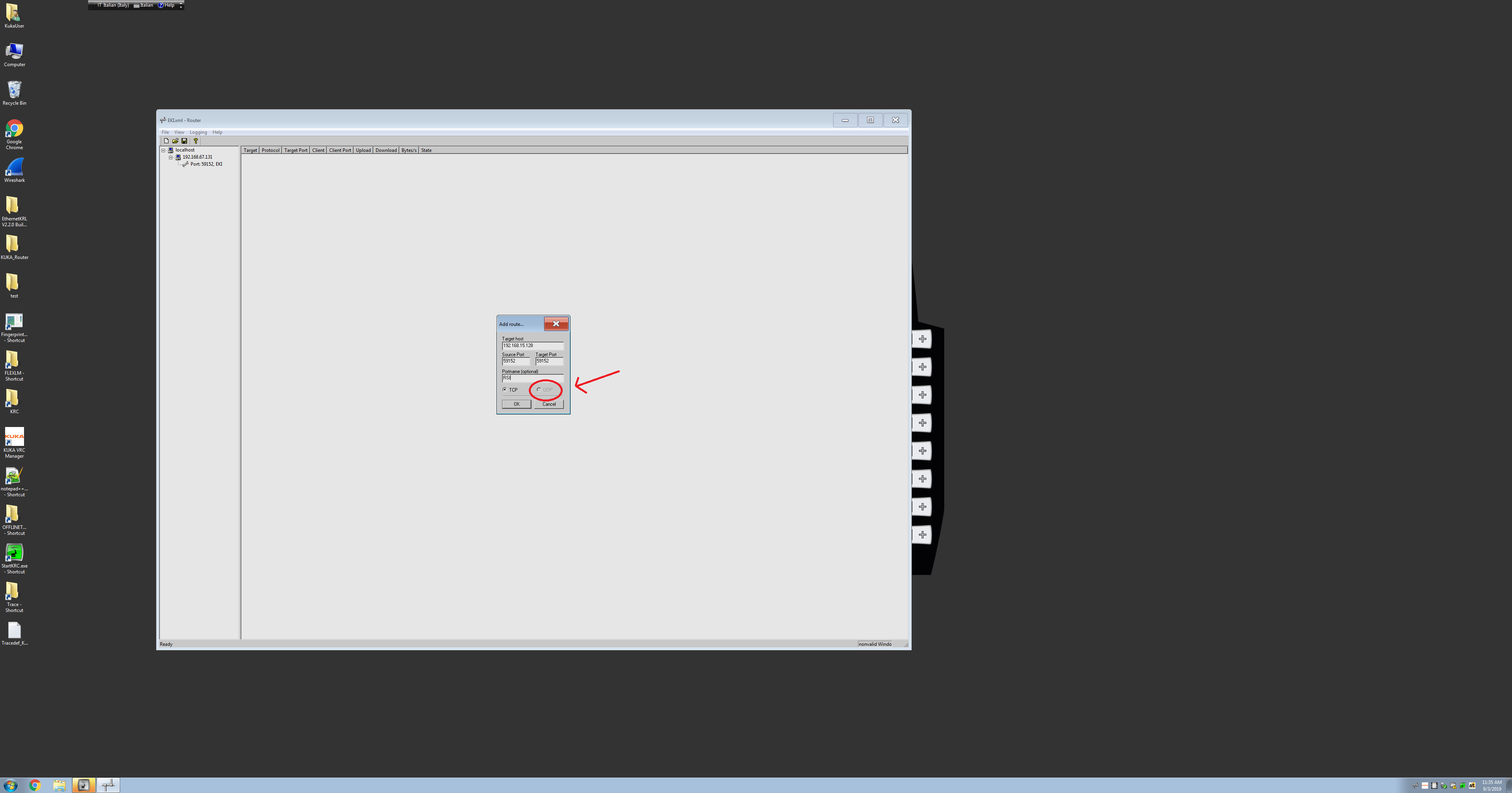
P.S: for the RSI configuration I think I did everything by the book, relying on an additional host-only network interface added in the VM for the purpose and properly configured. I tested the RSI Ethernet Example while wireshark was sniffing packets on the correct interface, nothing was sent from the SmartHMI to the host machine where the RSI TestServer was running, and the KRL program died at the RSI_MOVECORR() line after giving an RSIBad status.