








Hi Guys,
I'm relatively new to Fanuc robots and the whole idea of remappable IO is confusing the living daylights out of me.
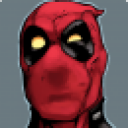
We have a welding robot set up running using only the onboard IO. In the program the original integrator has some flags set up but for the life of me I can't find which inputs they are mapped to. I have read that in order to map io to flags you would need to use Rack 34.
But as far as I can tell they haven't mapped anything to that rack. They are only using rack 0 and rack 35. (and rack 90 for the arclink).
Could someone have a look at the attached picture and try and explain how they are doing this?





