Me and Mikalaanning are working on a school project. Our code is a modified version of the one from an earlier post, https://www.robot-forum.com/robotforum/kuk…school-project/
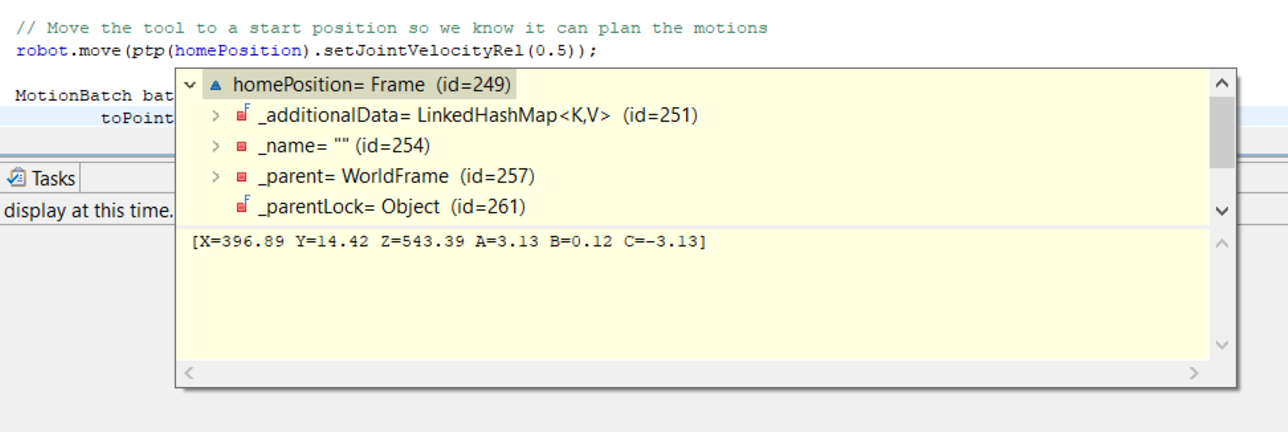
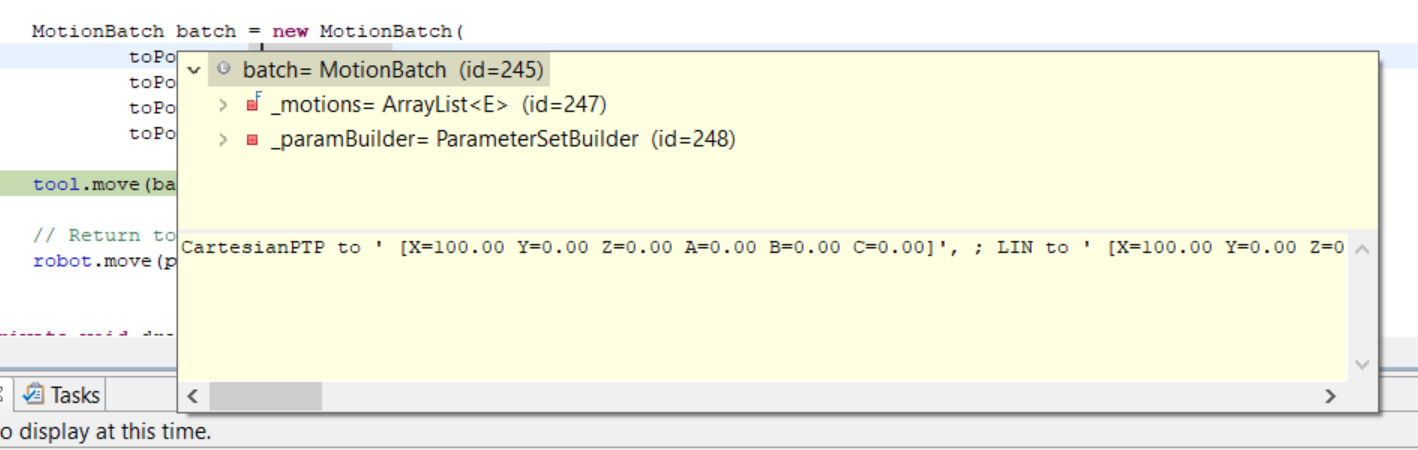
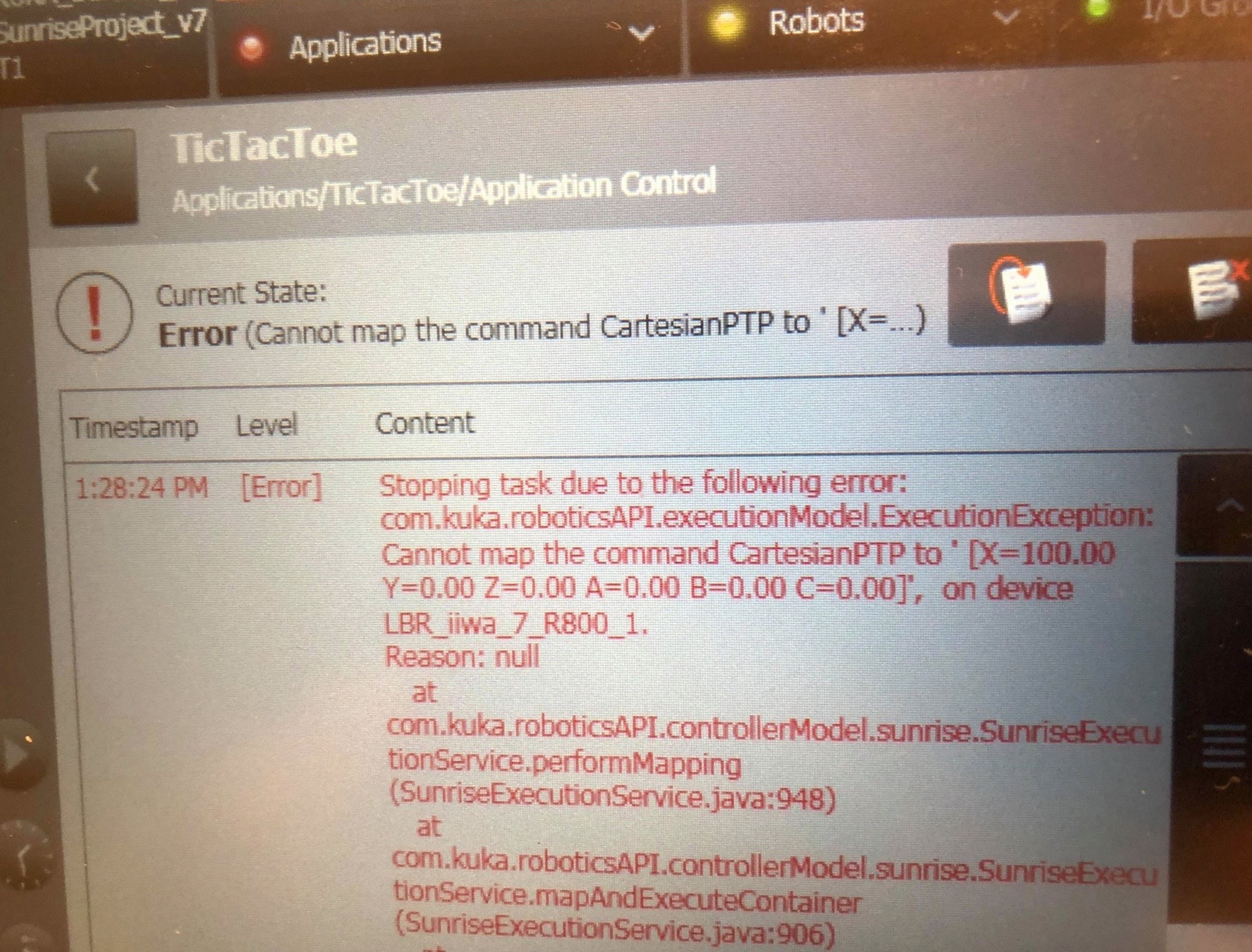
But in the code which NullReference provided us, we got into a problem with the calculation and movements of the robot. Getting Nullpoint exception in the Frame [][], seems it cant get the values from the array.
We are quite limited in our experience with the robot, so the solution we came to was declaring each frame induvidually.
So there is a few question we need some answers to:
- Is there a better solution then declaring each frame?
- If we decide to declare them induvidually, how should we go about calculating them?
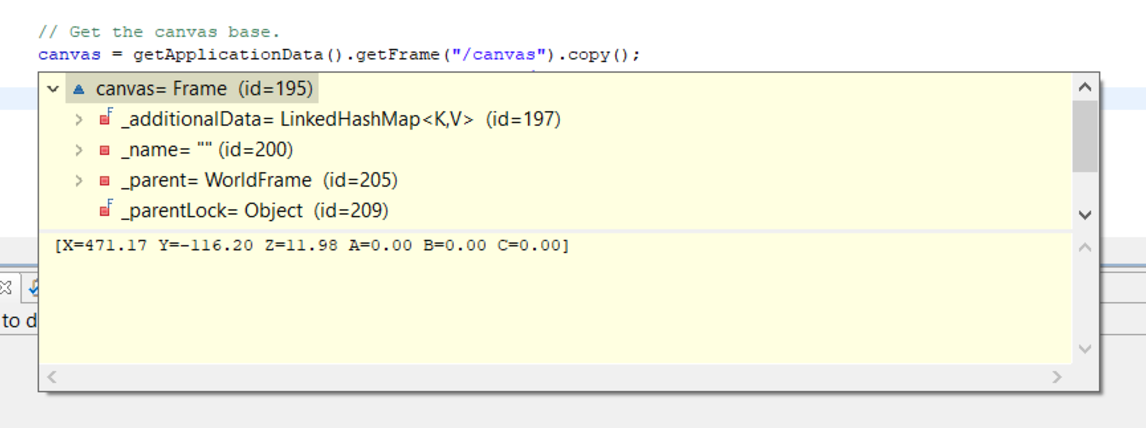
- As of right now, our baseplane got to be defined on each start up, is there a good way to impliment a four point plane to our code?
May our prayers to the robot gods and gurus be heared.