







Hello,
We accidently removed the battery lid and the robot needs to be calibrated. We get BZAL alarm for each axis.
My manager adviced me to use quick master method according to this article http://www.productivity.com/wp-content/upl…very-Method.pdf
Sadly we can't even jog the robot in "joint" coord. We get "system is in error status" error. In coordinates we can see joint values in degrees but when I switch to world its empty and says "robot needs calibration". What should I do to perform calibration and be able to move?

Fanuc m710i/70 - Calibration needed after removing battery lid
-
Ziomek5 -
December 30, 2016 at 11:36 AM -
Thread is marked as Resolved.
-
-
MENU - 0.NEXT - 6.SYSTEM
F1[TYPE] - 3.Calib
(when that menu disappear from TYPE... 6. Variable - 427.$MASTER_ENB value set 1 (It will be different robot option or Version. find out MASTER_ENB Character)
When you into "3.Calib" menu..
F3[RES_PCA] -> YES
BZAL alarm will be reset.
and, Jogging all joint Center match "Eye_Mark" (maybe attach each joints)
then, 2. Zero Position Master -> Enter
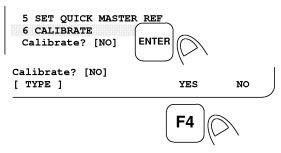
6. Calibrate -> EnterDone~
-
Thanks but isn't Zero Position Master method not as accurate as quick master? Can I recalibrate it again with quick master after this ? Or can I in last step use quick master ?
-
You must Decide "3. Quick Master" before Robot's all joint reach near "0' Degree" ...
You can use Quick Master. If robot has Reference Master_Counter value data.
but, data something wrong or replace some Server_motor or etc...
just 2.Zero Position master do it.
ah, When you replace "Encoder Backup Battery", Must remind with "Power_On" Status.
Don't turn_off .
-
Ok, but F3[RES_PCA] -> YES option doesn't reset BZAL alarms, we still can't move. Any other solution?
-
Error : SRVO_062 BZAL
Countermeasure :
MENU - 0.NEXT - 6.SYSTEM
F1[TYPE] - 6.Variables$MCR.$SPC_RESET value change to "TRUE" (it will be automatically return to FALSE in short time)
Press and release "Reset" button.
-
Problem solved: You need to turn off and turn on the power switch for RES_PCA to take effect.
-
oh, sorry. my mistake.
anyway sounds good.
Advertising from our partners






